
Nonlinear Tracking Control of a Human Limb via Neuromuscular Electrical Stimulation
Abstract
A nonlinear control method is developed that uses neuromuscular electrical stimulation to control the human quadriceps femoris muscle undergoing non-isometric contractions. The objective of the controller is to position the lower limb of a human along a time-varying trajectory or a desired set point. The developed controller does not require a muscle model and can be proven to yield asymptotic stability for a nonlinear muscle model in the presence of bounded nonlinear disturbances.
Motivation
- Challenges to closed loop control methods in NMES are muscle fatigue, time delay, muscle spasticity, changing muscle geometry , electrode placement, inter-subject and daily variations in muscle properties.
- PID based controllers lack supporting stability analysis for nonlinear muscle model.
- NN based techniques exhibit performance degradation while estimates update and yield uniformly ultimately bounded results due to function approximation error.
- Certain techniques like LQR assume linear governing equations for muscle model.
Muscle Model
The total muscle knee joint model can be categorised into a) muscle activation and contraction dynamics b) body segemental dynamics. The muscle activation and contraction dynamics explains the force generation in the muscle while the body segemental dynamics considers the active moment
and passive joint moments.
a) Muscle activation and contraction dynamics: The total force generated in the muscle depends on number of recruited muscles and summation level of muscle contraction which further depend on amplitude and frequency of the stimulation pulse, respectively.
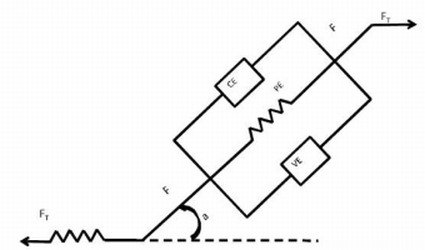
Fig 1. Modified mechanical muscle model takes in account tendon attached as series element where a is the pennation angle. FT and F denote tendon force and muscle force, respectively.
b) Body segemental dynamics: The total knee-joint dynamics can be modeled as
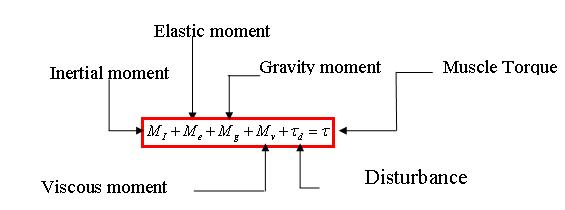 Fig.2 Knee joint body dynamic Model.
Fig.2 Knee joint body dynamic Model.
Problem Statement
- Enable a human knee-shank system to track a desired trajectory.
- Measurable terms-knee angle (q) and velocity (q).
- Inertial, Elastic, Viscous, Gravity, Disturbance are unknown nonlinear terms.
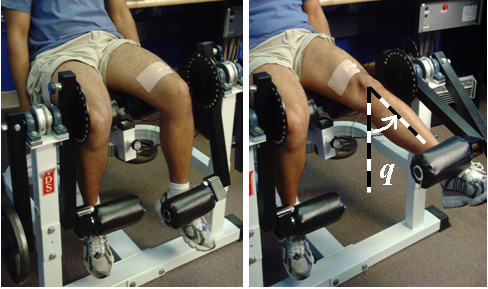
Fig. 3 Figure depicting subject before and during NMES experiments. In the left figure, subjects left leg is in relaxed state. The right figure shows the left leg during stimulation. The angle q(t) is measured with respect to the vertical line as shown.
Methodology
A position tracking error system is denoted as e1(t) where qd(t) is the desired trajectory and q(t) is the actual knee angle moved.

The filtered tracking errors e2(t) and r(t) are defined to facilitate closed loop stability analysis but are not used in the controller due to acceleration measurements.

In the above equation, &alpha1 and &alpha2 are positive constants. The RISE feedback controller V(t) is employed as a means to achieve the tracking objective with a constant 100 µsec pulse width and 100 Hz frequency,

where Ks and &beta are positive adjustable control gains.
Experimental Results with Human Subjects
Experiments were performed using the RISE controller. The voltage controller was implemented through an amplitude modulation scheme composed of a variable amplitude positive square wave with a fixed pulse width of 100 µsec and fixed frequency of 30 Hz. The following results indicate that the RISE algorithm was able to minimize the knee angle error while dynamically tracking a desired wobbling sinusoidal trajectory.
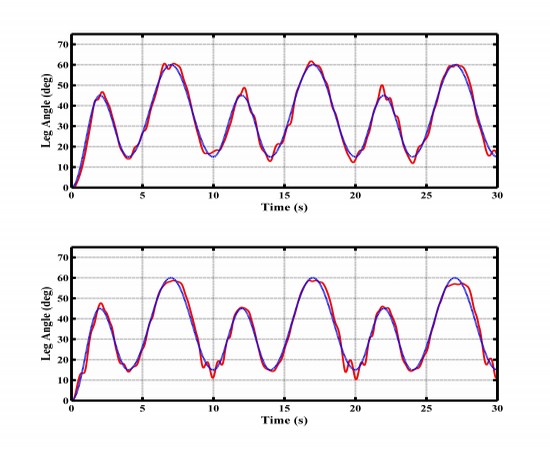
Fig. 4 The top and bottom graphs show the actual knee joint tracking (red) versus desired leg angle trajectory (blue line) of left and right legs, respectively, of a healthy subject.
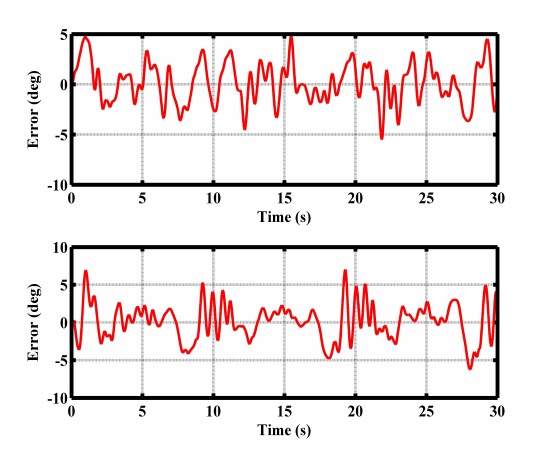
Fig. 5 The top and bottom graphs show the tracking error of knee joint angle (desired angle minus actual angle) of left and right legs, respectively, of a healthy subject.
A movie of the experiment is provided below.
Publications
K.Stegath, N.Sharma,C.M. Gregory, and W. E. Dixon, Nonlinear Tracking Control of a Human Limb via Neuromuscular Electrical Stimulation, IEEE American Control Conference, Seattle, WA, 2008, to appear.