
Network Synchronization
Introduction
Various modern applications require synchronization between networked agents, including robotic manipulators, sensor arrays, small satellites and generators. Synchronization refers to the mutual state tracking between two or more networked agents. Compared to general consensus, synchronization can emphasize similarity in state while tracking a desired trajectory.
Simulation Results
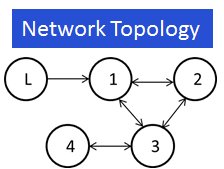

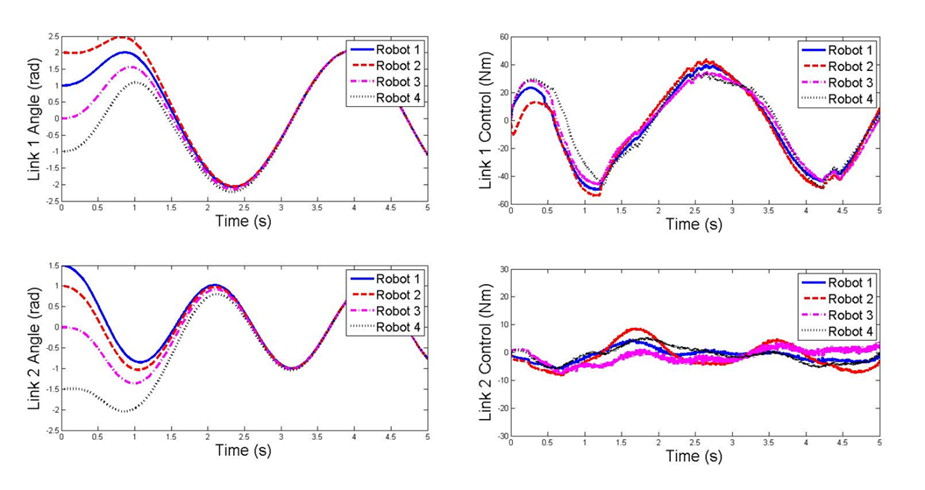
- Simulation of four networked two-link robotic arms with uncertain dynamics.
- The network leader's state is available to only one node.
- Each node has an exogenous disturbance.
- Decentralized, asymptotic state synchronization and leader tracking are achieved using a modified RISE controller.
Related Publications
Z. Kan, J. Klotz, E. L. Pasiliao, and W. E. Dixon, Containment Control for a Directed Social Network with State-Dependent Connectivity, American Control Conference, Washington, DC, 2013, submitted.
Z. Kan, Eduardo L. Pasiliao Jr, J. W. Curtis, and W. E. Dixon, Particle Filter Based Average Consensus Target Tracking with Preservation of Network Connectivity, Military Communications Conference (MILCOM), Orlando, FL, 2012, pp. 760-765.