Autonomous Underwater Vehicle Control
Introduction
The dynamics of an AUV are time-varying, nonlinear and can often include difficult to model effects such as hydrodynamic damping and external disturbances such as sea states or ocean currents. Motivated to provide robustness to model uncertainty, a continuous robust integral of the sign of the error (RISE) control structure is used to compensate for uncertain nonautonomous disturbances that do not satisfy the linear-in-the-parameters assumption for a class of coupled, fully-actuated underwater vehicles. A Lyapunov-based stability analysis is provided to show that the control method yields semi-global asymptotic tracking. The resulting controller is experimentally validated on a six degree-of-freedom AUV developed at the University of Florida. Preliminary experimental trials are carried out in a swimming pool to demonstrate the performance of the controller. Additionally, an open-water sea-trial was completed in the Gulf of Mexico off the coast of Panama City Beach, FL to illustrate the robustness of the design in a real-world environment.
Results
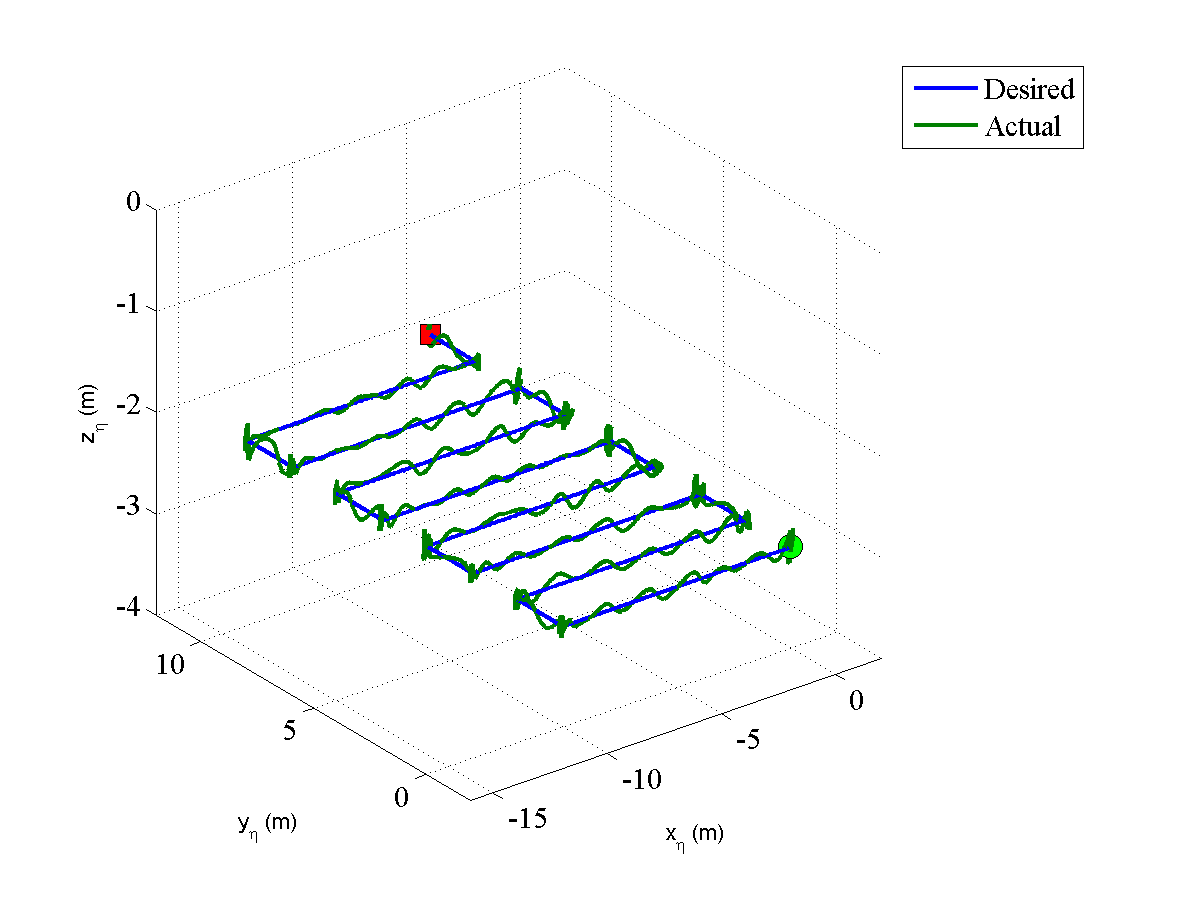
Pool Trial
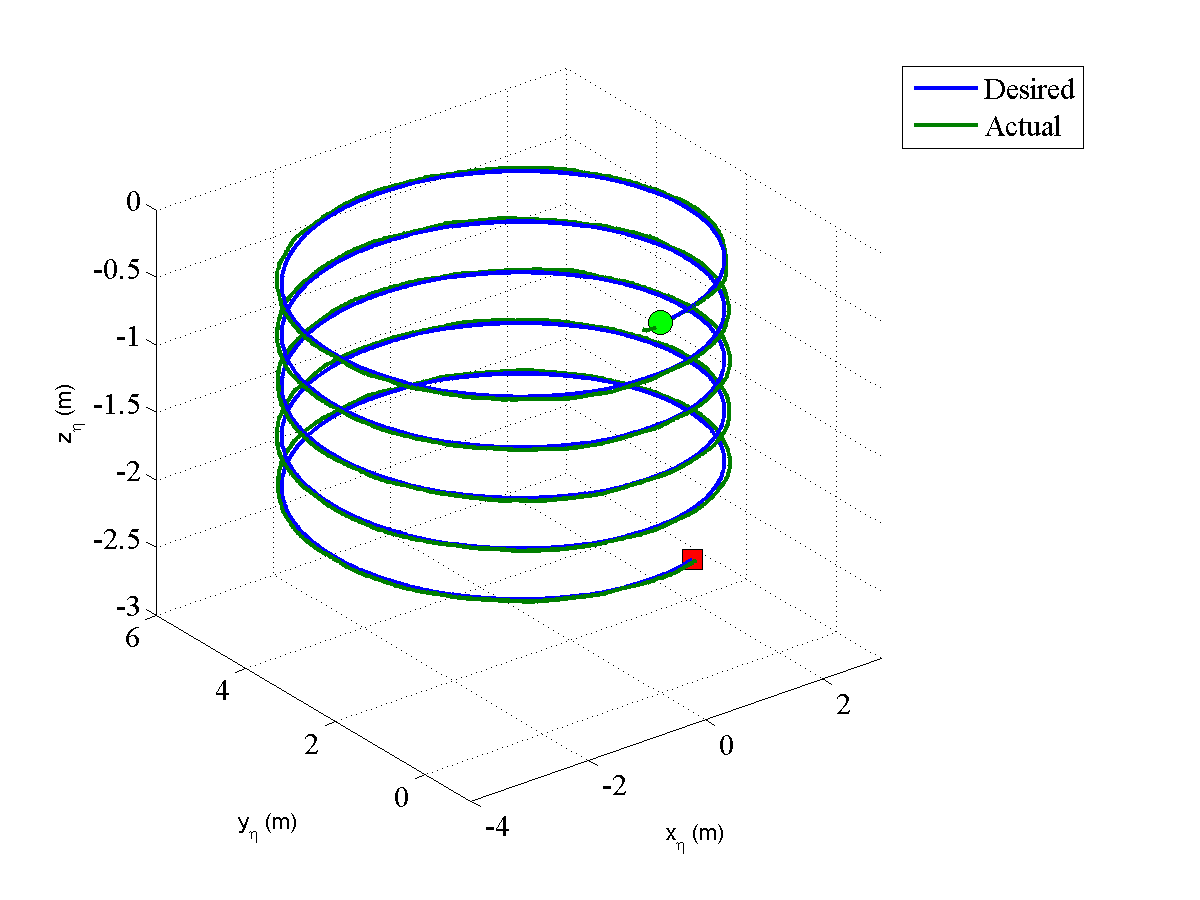
Sea Trial