
Reduced-Order Nonlinear Observer for Range Estimation
Abstract
An application and experimental verification of the developed method is presented to estimate the structure of a moving object using a moving camera. An unknown input observer is implemented for the structure estimation of a moving object attached to a two-link robot observed by a moving camera attached to a PUMA robot. The velocity of the object is considered as an unknown input to the perspective dynamical system. Series of experiments are performed with different camera and object motions. The method is used to estimate the structure of the static object as well as the moving object. The position estimates are compared with ground-truth data computed using forward kinematics of the PUMA and the two-link robot. The observer gain design problem is formulated as a convex optimization problem to obtain an optimal observer gain.
Experimental Results
To verify the designed unknown input observer for real-time implementation, experiments are conducted on a PUMA 560 serial manipulator and a two-link planar robot.
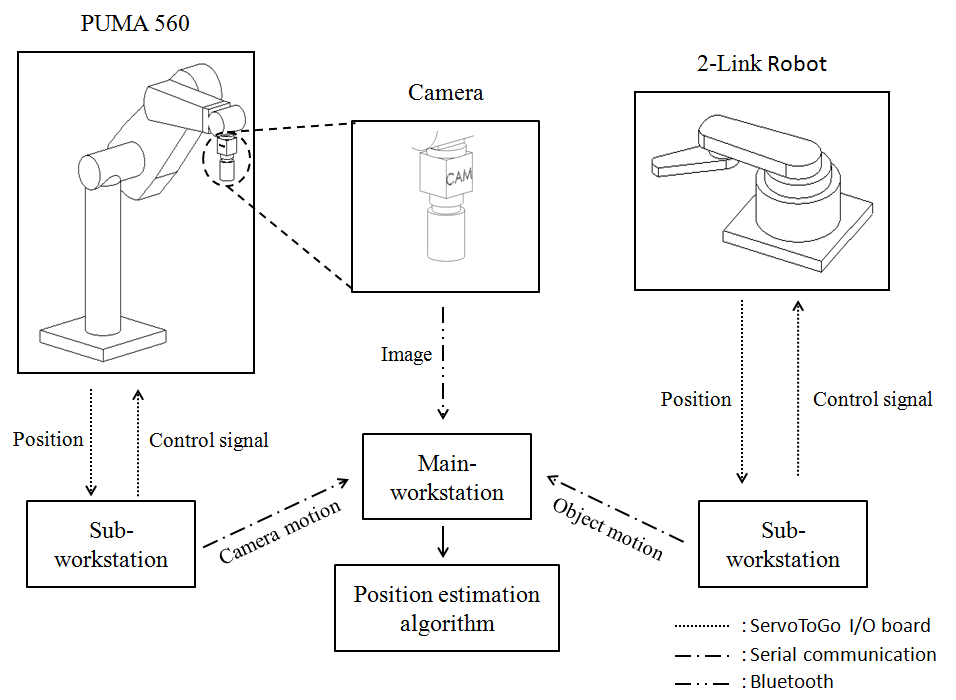
The testbed consists of five components, as shown in Figure 1a: (1) robot manipulators, (2) camera, (3) image
processing workstation (main), (4) robot control workstation (PUMA and two-link), and (5)
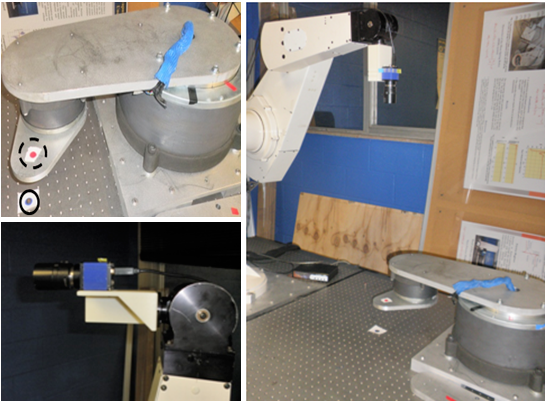
serial communication. Figure 1b shows the experimental platforms. A camera is rigidly fixed to
the end-effector of the PUMA 560. The PUMA and the two-link robot are rigidly attached to a
work table. Experiments are conducted to estimate the position the moving
object. A fiduciary marker is used as an object in all the experiments. The object is fixed to the end-effector of the two-link robot which follows a desired trajectory.
The PUMA 560 is used to move the camera while observing the moving object.
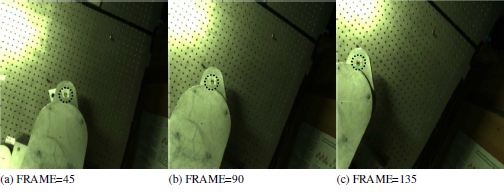
Feature points are tracked using the KLT feature point tracking algorithm, as shown in Figure 2.
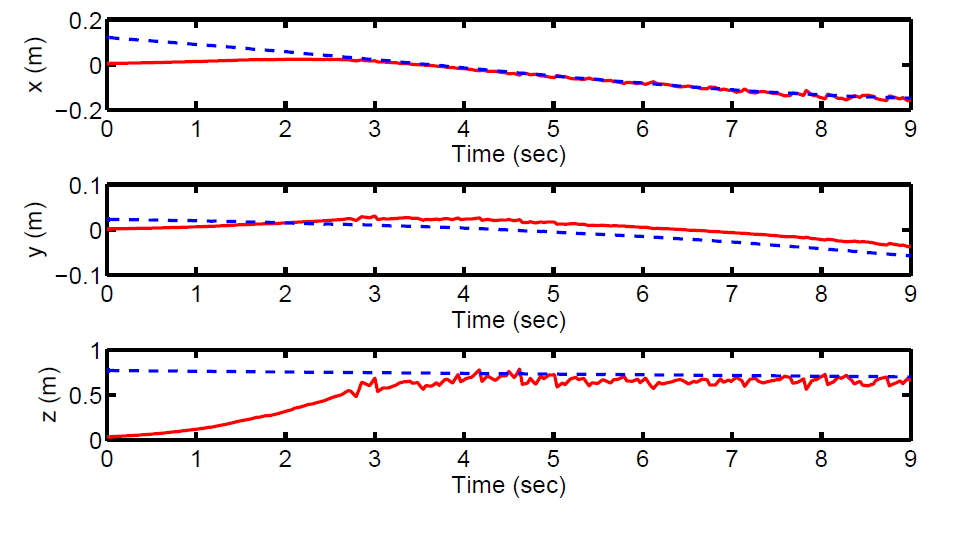
The observer is used to estimate the position of a moving object using a
moving camera. Given the angular and linear velocity of the moving camera, the position of the
moving object relative to the moving camera is estimated. A downward-looking camera observes
a moving point fixed to the moving two-link robot arm as illustrated in Fig. 2. In this case, the
object is moving in the X-Y plane with unknown velocities vpx(t) and vpy(t). In the experiment,
the linear velocity of camera has two time-varying velocities to test the observer with more
generalized trajectory of the moving camera.
Publications
S. Jang, A. Dani, C. Crane, and W. E. Dixon, "Experimental Results for Moving Object Structure Estimation Using an Unknown Input Observer Approach," ASME Dynamic Systems and Control Conference, Ft. Lauderdale, FL, 2012.
A. Dani, Z. Kan, N. Fischer, and W. E. Dixon, "Structure Estimation of a Moving Object Using a Moving Camera: An Unknown Input Observer Approach," IEEE Conference on Decision and Control, Orlando, FL, 2011, pp. 5005-5010 (invited paper).
More Publications