
Monocular Visual Servo Tracking of Wheeled Mobile Robots
Introduction
In this project, the performance of a recently developed homography-based visual servo controller was examined that enables a wheeled mobile robot (WMR) to track a prerecorded desired time-varying feature point trajectory. The goal of this project is to demonstrate the ability to use spatial geometric (homographic) relationships between multiple images as a means to compensate for the lack of depth information inherent in a monocular camera system mounted on a WMR.
Background and Motivation
To determine the position and orientation of a robot with respect fixed location, various strategies have been investigated including Global Positioning Systems, and laser and sound ranging techniques. Due to various shortcomings associated with these techniques in some environments, researchers have explored the use of camera-based vision systems. Vision systems can provide an intelligent sense of perception for robotic systems that are required to operate in an unknown and/or dynamically changing environment that are endemic in decommissioning and decontaminating (D&D) operations. Typically, a stereo pair of cameras are required to extract depth information about a scene. Unfortunately, the position and orientation of each camera must be precisely calibrated and the requirement for an additional camera leads to increased cost, complexity, and processing burden.
Methodology and Work Description
Based on the success of image extraction/interpretation technology and advances in control theory, more recent research has focused on the use of a monocular vision system for acquiring depth information, for path planning, and for servo control. To achieve this objective, the corresponding feature points between a prerecorded image trajectory and the current image are compared and a homography is constructed. By decomposing the homography, rotation and translation information can be decoupled from the images and used as feedback in an adaptive, Lyapunov-based control strategy
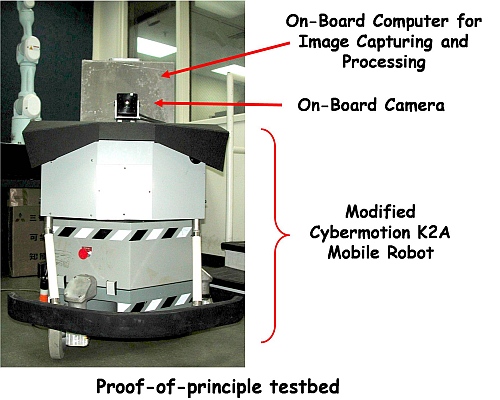
To demonstrate the performance of this technique, a mobile robot platform typically used in Department of Energy D&D operations was equipped with a single camera and an additional computer.
- A target with four feature points was constructed.
- An intensity thresholding image processing algorithm was developed and implemented to capture the image features.
- A desired image trajectory was recorded.
- A Singular Value Decomposition-based algorithm was implemented that extracted rotation and translation error information from a comparison of the prerecorded and current images.
- A controller was implemented to force the robot to follow the desired image-space trajectory.
Results
The performance of the homography-based visual servoing controller was experimentally demonstrated. The performance of the controller is indicated by the following plots.
Future Work
In this project the desired WMR trajectory was prerecorded through a Teach-By-Showing approach. Future work will target generating the desired motion from a Teach-By-Zooming approach that is performed on the fly with an adjustable focal length camera. Future work will also target generating navigation functions based on current image information to control a mobile robot in the presence of obstacles.
Publications
J. Chen, W. E. Dixon, D. M. Dawson, and M. McIntire, Homography-based Visual Servo Tracking Control of a Wheeled Mobile Robot, Proceedings of the 2003 IEEE International Conference on Intelligent Robots and Systems, accepted, to appear.
W. E. Dixon, Teach by Zooming: Camera Independent Alternative to Teach by Showing Visual Servo Control, Proceedings of the 2003 IEEE International Conference on Intelligent Robots and Systems, accepted, to appear.
E. Holcombe and W. E. Dixon, Monocular Visual Servoing of Wheeled Mobile Robots, Journal of Undergraduate Research, submitted for publication.