
Nonlinear RISE-based Control of an Autonomous Underwater Vehicle
Introduction
Advances in sensing and control are enabling autonomous surface vehicles (ASV) and autonomous underwater vehicles (AUV) to become vital assets in search and recovery, exploration, surveillance, monitoring, and military applications. Accurate and robust trajectory tracking control is crucial to the performance of these vehicles and to the advancement of autonomy in the maritime environment. The dynamics of an AUV are time-varying, nonlinear and can often include difficult to model effects such as hydrodynamic damping and external disturbances such as sea states or ocean currents. Motivated to provide robustness to model uncertainty, a continuous robust integral of the sign of the error (RISE) control structure is used to compensate for uncertain nonautonomous disturbances that do not satisfy the linear-in-the-parameters assumption for a class of coupled, fully-actuated underwater vehicles. A Lyapunov-based stability analysis is provided to show that the control method yields semi-global asymptotic tracking. The resulting controller is experimentally validated on a six degree-of-freedom AUV developed at the University of Florida. Preliminary experimental trials are carried out in a swimming pool to demonstrate the performance of the controller. Additionally, an open-water sea-trial was completed in the Gulf of Mexico off the coast of Panama City Beach, FL to illustrate the robustness of the design in a real-world environment.
Results
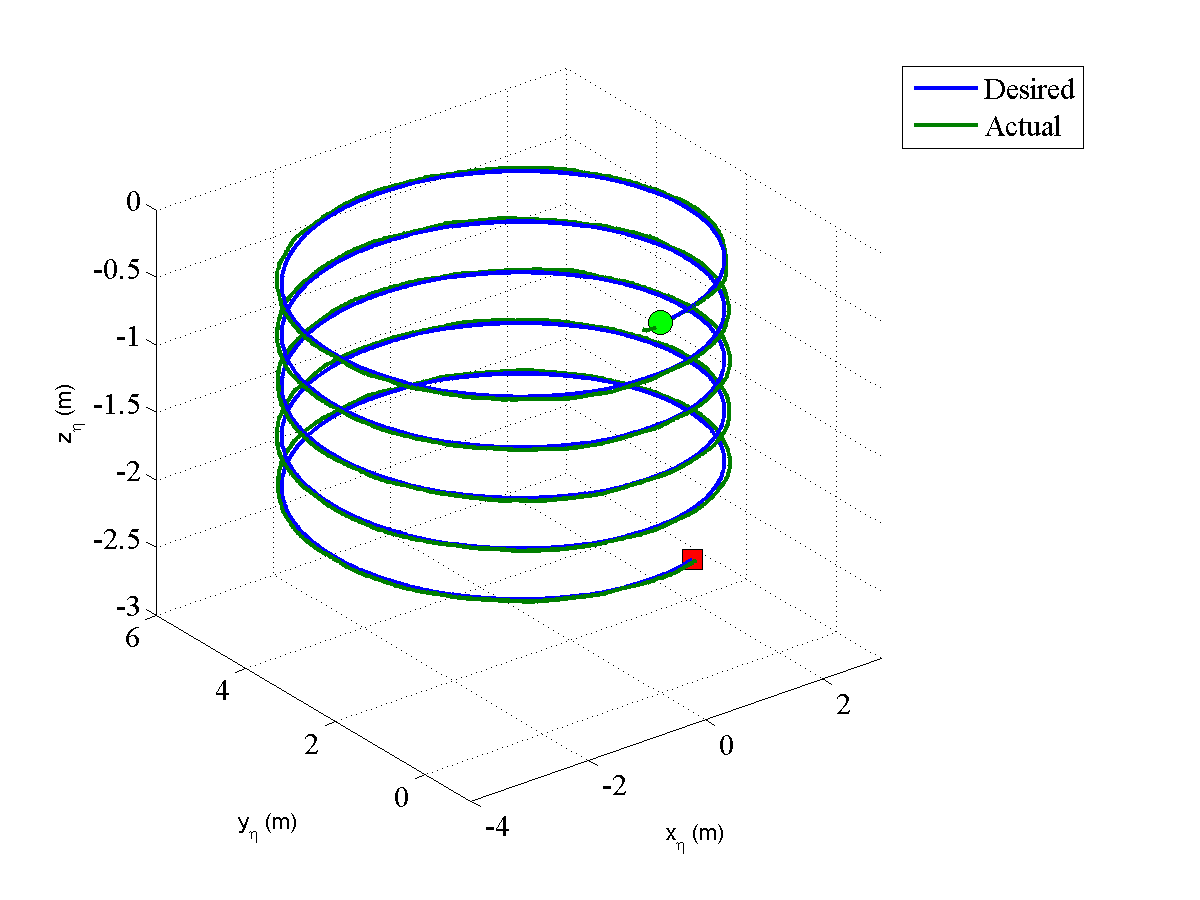
Pool Trial
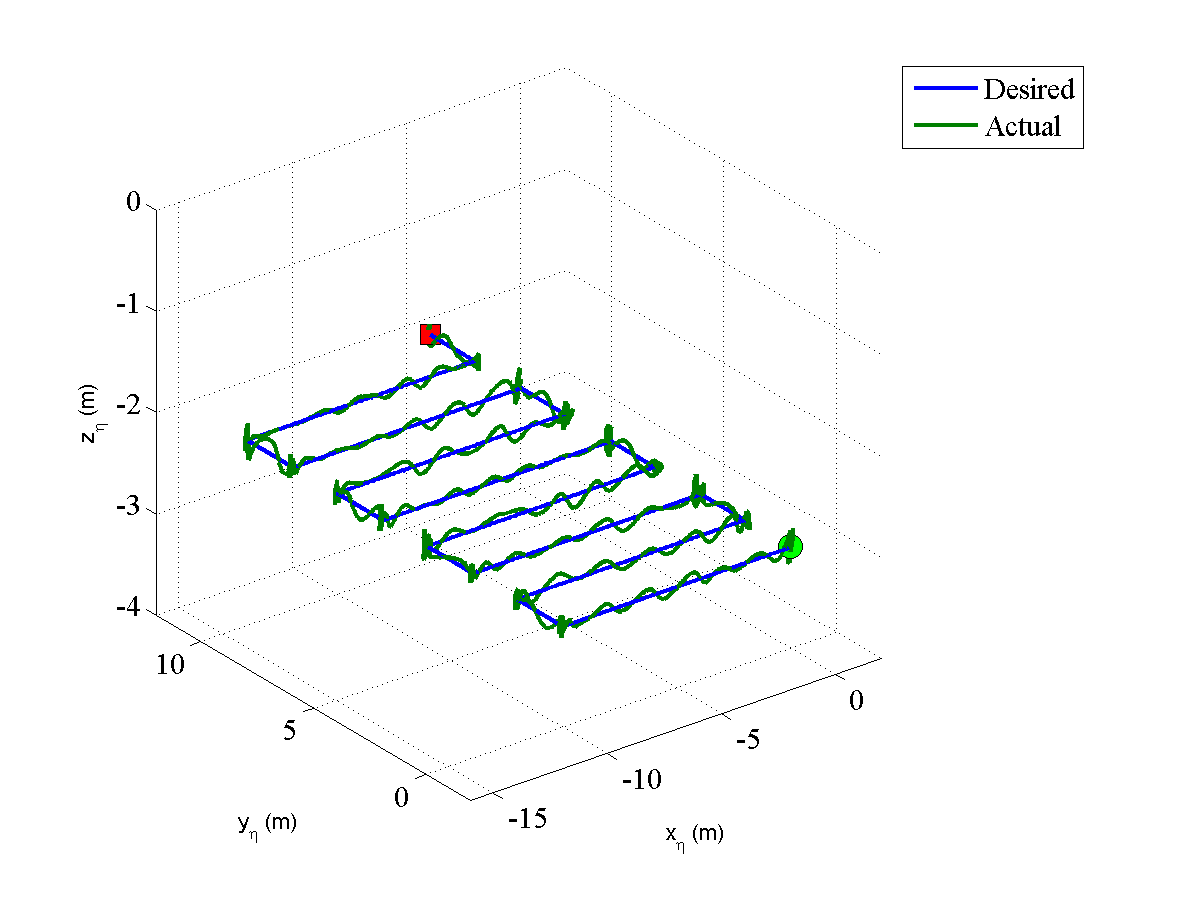
Sea Trial
Publications
N. Fischer, S. Bhasin, and W. E. Dixon, Nonlinear control of an autonomous underwater vehicle: A RISE-based approach, in Proc. Am. Control Conf., San Francisco, CA, 2011, pp. 39723977.
N. Fischer, D. Hughes, P. Walters, E. M. Schwartz, and W. E. Dixon, "Nonlinear RISE-based Control of an Autonomous Underwater Vehicle," IEEE Trans. Robot., under review.