| Autonomous Underwater Vehicles |
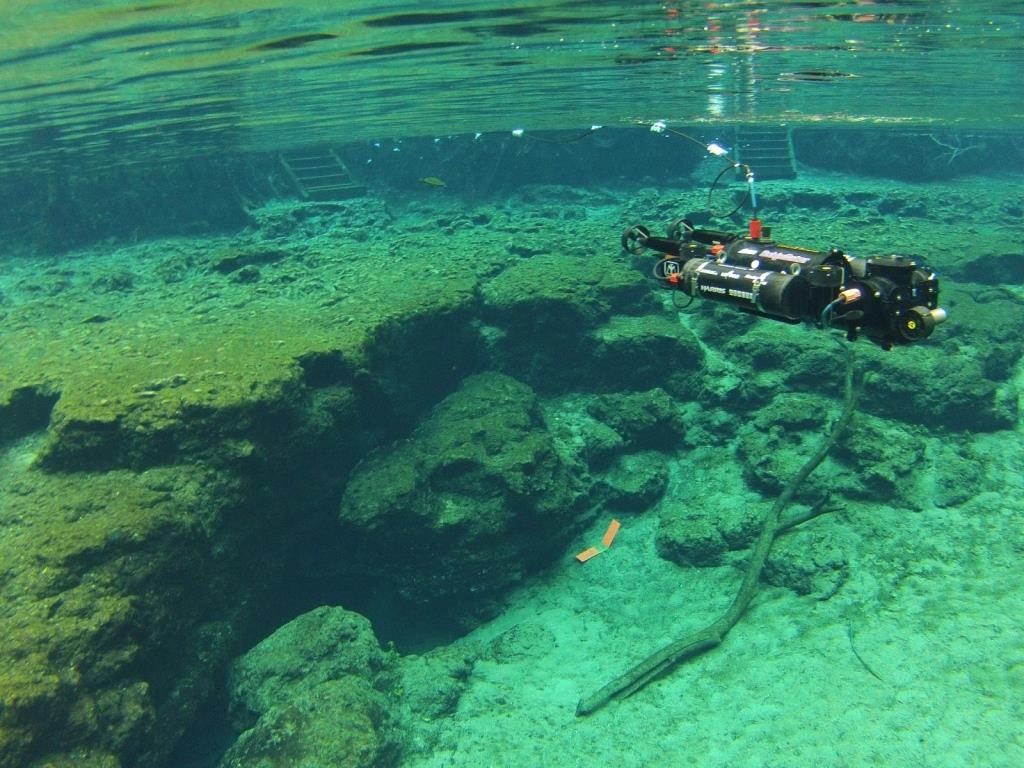
Advances in sensing and computational capabilities have enabled autonomous
vehicles to become vital assets across multiple disciplines. These improved capabilities
have led to increased interest in autonomous marine craft. As the technologies of
these vehicles mature, there is a desire to improve the performance of their motion
control systems so that these vehicles can better achieve their mission objectives. Path
planning, station keeping, and path following are critical control objectives of marine
craft that enable autonomous docking, surveying, etc. Improving the performance
of these control objectives for marine craft directly correspond to improved range,
endurance, accuracy, and robustness in different environmental conditions. NCR research efforts
focus on various nonlinear control methods to achieve trajectory tracking, path following application
in the presence of unknown currents. Efforts also focus on how to achieve these objectives in an optimal manner
despite uncertainties and nonlinearities associated with the vehicle and the environment, including unknown obstacles.
Results for RISE-based tracking control in a swimming pool |
| Autonomous Surface Vehicle |
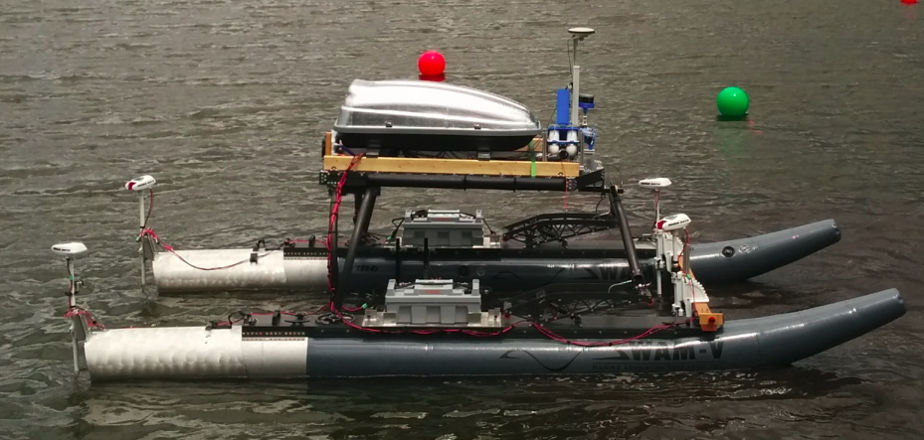
Control of marine craft, such as commercial and government
ships or autonomous surface vessels (ASV), remains an important research topic because of the many organizations that use waterways, e.g.,
shipping across oceans, mapping rivers, or protecting borders. In many of these scenarios, the model used for control of the marine craft may be uncertain.
Rigid body and hydrodynamic parameters, i.e., added mass, centripetal-Coriolis effects, and drag, may be difficult to calculate.
NCR research efforts focus on the development of control methods that are capable of compensating for model uncertainties through robust and adaptive control methods.
|
Autonomous Air Vehicles |

Research efforts in this area are focused on agile flight domains where nonlinear dynamics are prevalent. In additional to such flight regimes, efforts focus on uncertain flight characteristics. In particular, the control influence matrix depends on the flight conditions. Efforts have focused on adaptive approaches to compensate for the uncertain nonlinear state-dependent dynamics. |
Small Satellites |

Due in part to the costs associated with launching large, heavy payloads into space, the space industry is moving toward smaller satellites and the technology to support them. Some proposed uses of these small satellites (small-sats) include astrophysics research, surveillance, and autonomous servicing, all of which require precision attitude motion. However, due to their smaller sizes, the attitude motion of these small-sats is more susceptible to external disturbances than their larger counterparts. Furthermore, the smaller sizes of these new small-sats limit the mass, power and size budgets allocated to their attitude control systems (ACS). These contradictory requirements necessitate novel solutions for the ACS. For small-sats, the desired torques are typically generated by a cluster of single gimbal control moment gyroscopes (CMGs) due to their low mass and low power consumption properties. Unfortunately, the torque producing capacity of CMGs can deteriorate over time due to changes in the dynamics such as bearing degradation and increased friction in the gimbals. Nonlinear adaptive attitude controllers are developed in this research to compensate for time-varying uncertain satellite inertia, nonlinear disturbances, and uncertain CMG gimbal friction and electromechanical CMG disturbances. A uniformly ultimately bounded (UUB) stability result is proven via Lyapunov analysis for the case in which static and dynamic friction effects and nonlinear electromechanical disturbances are included in the CMG dynamic model. |
Hypersonic Vehicles |
Hypersonic flight remains a challenging and rewarding field of aerospace technology research. Using scramjet engines and flying beyond Mach 5 pose a number of unique challenges not encountered by traditional aircraft. Such challenges include highly nonlinear aerothermoelastic effects. During hypersonic flight, speeds are high enough that there is a significant heating due to the compressed atmosphere. As the temperature of the aircraft's structure changes so too do the flight characteristics. NCR is investigating these nonlinear aerodynamic, thermal, and elastic effects and their interactions with structural and flight dynamics. By using nonlinear control methodologies developed in our lab, we have been able to show pitch-rate tracking stability in the presence of unknown and time-varying aerothermoelastic effects. Using Lyapunov-based stability analysis and simulation verification, our nonlinear controllers are able to robustly adapt to the continuously changing environment encountered during hypersonic flight. |
Image-Based Guidance Navigation and Control |
Image-based feedback can provide aerospace vehicle with extended mission capabilities. For example, imaging sensors are used for search and rescue, moving-target tracking, immediate bomb damage assessment, and identification and localization of interesting ground structures. Often air vehicles may need to operate in adverse environments, such as complex urban terrains where GPS may not be available. The speed of an aeronautical vehicle and the unstructured nature of the viewed scene present challenges for image-based navigation. NCR research efforts address such challenges by developing methods to keep feature in the camera field-of-view (FOV) and providing robustness when they do leave the FOV through observers and image geometry. |
Limit Cycle Oscillations |

In modern fighter aircraft, limit cycle oscillations (LCO) manifest as an anti-symmetric, non-divergent periodic twisting and bending motion of the wings. LCO can affect the pilot's ability to perform tasks such as reading gauges and the heads up display (HUD). Typical solutions involve avoiding certain flight conditions and delaying the release of ordnance. The objective of this project is to develop a control strategy that augments current flight controllers to suppress LCO behavior while remaining robust to modeling uncertainties and exogenous disturbances. |
Biomimetic Approaches to Flight Control and Inertial Stabilization |
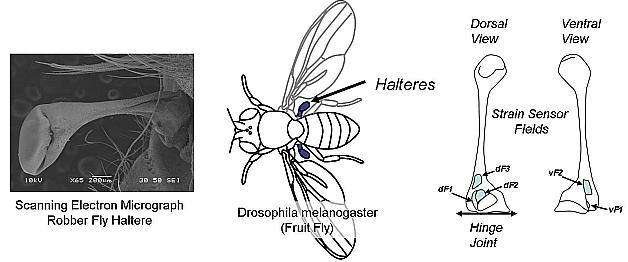
Natural systems have evolved very robust solutions to highly complex problems. Large numbers of simple low fidelity sensors are typical, rather than sophisticated highly optimized single sensors. Sensor fusion, deriving measurements from multiple sensor modalities is common, for example, using both visual and inertial sensing simultaneously to measure body angular rate. The goal of this research is to learn from nature robust solutions to feedback control problems that might not have normally been considered following the traditional paradigm of engineering design. Current activities are focusing on insects to understand how inertial measurement occurs for flight stabilization. Gyroscopic sense organs called halteres are being simulated to understand how insects reconstruct 3 orthogonal components of the inertial rate vector using very simple fields of strain sensors. 6DOF flight simulations are also being constructed to reveal how extremely dynamic flight maneuvers and complex navigation solutions result from fusion of visual, inertial, and olfactory feedback. |
Sponsors |
| Ongoing Projects
AFOSR: Center of Excellence in Assured Autonomy in Contested Environments AFOSR: A Switched Systems Approach for Navigation and Control with Intermittent Feedback NSF: Adaptive dynamic programming for uncertain nonlinear systems through coupling of nonlinear analysis and data-based learning AFRL: Privileged Sensing Framework ONR: Mine Counter Measure Path Planning and Optimal Control in Uncertain and Dynamic Maritime Environments Completed Projects Prioria: Observer Methods for Image Based Autonomous Navigation Florida High Corridor Matching Funds ONR: Adaptive Dynamic Programming for Autonomous Underwater Vehicles AFOSR: Research Institute for Autonomous Precision Guided Systems DARPA: Symbiosis of Micro-Robots for Advanced In-Space Operations Innovative Automation Technologies Inc: Micro Air Vehicle Tether Recovery Apparatus (MAVTRAP): Image-based MAV Capture and Tensegrity System AFRL: Vision-Based Guidance and Control Algorithms Research UCF: Image-Based Motion Estimation and Tracking for Collaborative Space Assets AFRL: Simultaneous Localization and Mapping UF: Conceptual Design Study for a Remote Sensing Nanosatellite Mission Prioria: Structure, Motion, and Geolocation Estimation for Autonomous Vehicles AFOSR: Active Vision for Control of Agile Autonomous Flight Florida High Corridor Matching Funds |
Related NCR Aerospace and Maritime Systems Publications |
% Encoding: windows-1252
@InProceedings{Aiken2006,
Title = {Lyapunov-Based Range Identification for a Paracatadioptric System},
Author = {D. Aiken and S. Gupta and G. Hu and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2006},
Address = {San Diego, California},
Month = {Dec.},
Pages = {3879-3884},
Keywords = {vision estimation, Guoqiang},
Timestamp = {2016.06.02},
Url1 = {http://ncr.mae.ufl.edu/papers/TAC08.pdf}
}
@InProceedings{Allen2019,
Title = {Cadence Tracking For Switched {FES}-Cycling With Unknown Time-Varying Input Delay},
Author = {B. Allen and C. Cousin and C. Rouse and W. E. Dixon},
Booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
Year = {2019},
Month = {October},
Keywords = {FES, NMES, BrendonAllenPub}
}
@InProceedings{Allen.Cousin.ea2019,
author = {B. C. Allen and C. Cousin and C. Rouse and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Cadence Tracking for Switched {FES} Cycling with Unknown Input Delay},
year = {2019},
address = {Nice, Fr},
month = {Dec.},
pages = {60-65},
keywords = {robotpub, NMES, FES, delay, BrendonAllenPub},
owner = {wdixon},
}
@InProceedings{Allen.Stubbs.ea2020,
Title = {Robust Cadence Tracking for Switched {FES}-Cycling with an Unknown Time-Varying Input Delay Using a Time-Varying Estimate},
Author = {B. C. Allen and K. Stubbs and W. E. Dixon},
Booktitle = {IFAC World Congr.},
Year = {2020},
Keywords = {NMES, Robotpub, BrendonAllenPub}
}
@InProceedings{Andrews.Klotz.ea2014,
author = {L. Andrews and J. Klotz and R. Kamalapurkar and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Adaptive dynamic programming for terminally constrained finite-horizon optimal control problems},
year = {2014},
pages = {5095--5100},
keywords = {Optimal, NN, theory, learning, aeropub},
owner = {wdixon},
timestamp = {2017.05.08},
}
@InProceedings{Anubi.Crane.ea2012,
author = {O. Anubi and C. Crane and W. E. Dixon},
booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
title = {Nonlinear Disturbance Rejection For Semi-active MacPherson Suspension System},
year = {2012},
address = {Fort Lauderdale, Florida},
month = {Oct.},
keywords = {Optimal, NN, theory, learning},
owner = {wdixon},
timestamp = {2017.05.08},
}
@InProceedings{Barnette2008,
author = {G. Barnette and J. Shea and W. E. Dixon},
booktitle = {Mil. Commun. Conf.},
title = {Sensing and Control in a Bandwidth-Limited Systems: A Kalman Filter Approach},
year = {2008},
address = {San Diego, CA},
month = {Jan.},
keywords = {networkpub, Optimal, theory},
timestamp = {2017.05.08},
}
@InProceedings{Barnette2010,
author = {G. L. Barnette and J.M. Shea and W. E. Dixon},
booktitle = {Mil. Commun. Conf.},
title = {Using Kalman Innovations for Transmission Control of Location Updates in a Wireless Network},
year = {2010},
address = {San Jose, CA},
pages = {2197-2202},
keywords = {networkpub, Optimal, theory},
}
@Article{Behal2002,
author = {A. Behal and D. M. Dawson and W. E. Dixon and Y. Fang},
journal = {IEEE Trans. Autom. Control},
title = {Tracking and Regulation Control of an Underactuated Surface Vessel with Nonintegrable Dynamics},
year = {2002},
pages = {495-500},
volume = {47},
keywords = {robotpub, aeropub},
timestamp = {2017.05.08},
url1 = {http://ncr.mae.ufl.edu/papers/tac02.pdf},
}
@InProceedings{Behal2000,
Title = {Tracking and Regulation Control of an Underactuated Surface Vessel with Nonintegrable Dynamics},
Author = {A. Behal and W.E. Dixon and D. M. Dawson and Y. Fang},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2000},
Address = {Sydney, Australia},
Month = {Dec.},
Pages = {2150-2155},
Keywords = {robotpub, aeropub},
Timestamp = {2017.05.08}
}
@Book{Behal2009,
author = {A. Behal and W. E. Dixon and B. Xian and D. M. Dawson},
publisher = {Taylor and Francis},
title = {Lyapunov-Based Control of Robotic Systems},
year = {2009},
issn = {0849370256},
keywords = {Robotpub, theory},
timestamp = {2017.05.08},
}
@Article{Behal2005,
Title = {Adaptive Position and Orientation Regulation for the Camera-in-Hand Problem},
Author = {A. Behal and P. Setlur and W. E. Dixon and D. M. Dawson},
Journal = {J. Robotic Syst.},
Year = {2005},
Pages = {457-473},
Volume = {22},
Keywords = {robotpub, vision estimation},
Url = {http://ncr.mae.ufl.edu/papers/jrs05.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/jrs05.pdf}
}
@PhdThesis{Bell2019,
Title = {Target Tracking In Unknown Environments Using a Monocular Camera Subject To Intermittent Sensing},
Author = {Z. Bell},
School = {University of Florida},
Year = {2019},
Keywords = {robotpub, vision estimation, aeropub},
Url1 = {http://ncr.mae.ufl.edu/dissertations/belldissertation.pdf}
}
@PhdThesis{Bellman2015,
Title = {Control of Cycling Induced by Functional Electrical Stimulation: A Switched Systems Theory Approach},
Author = {M. Bellman},
School = {University of Florida},
Year = {2015},
Keywords = {NMES, cycle, switched},
Url1 = {http://ncr.mae.ufl.edu/dissertations/Bellman.pdf}
}
@InProceedings{Bell.Deptula.ea2018,
Title = {Velocity and Path Reconstruction of a Moving Object Using a Moving Camera},
Author = {Z.I. Bell and P. Deptula and H.-Y. Chen and E. Doucette and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2018},
Pages = {5256-5261},
Keywords = {robotpub, vision estimation},
Owner = {wdixon},
Timestamp = {2018.01.22}
}
@Article{Bell.Nezvadovitz.ea2020,
author = {Z. Bell and J. Nezvadovitz and A. Parikh and E. Schwartz and W. Dixon},
journal = {IEEE J. Ocean Eng.},
title = {Global Exponential Tracking Control for an Autonomous Surface Vessel: An Integral Concurrent Learning Approach},
year = {2020},
month = apr,
number = {2},
pages = {362-370},
volume = {45},
keywords = {robotpub, learning, aeropub, RT2},
url1 = {http://ncr.mae.ufl.edu/papers/JOE20.pdf},
}
@InProceedings{Bell.Parikh.ea2016,
Title = {Adaptive Control of a Surface Marine Craft with Parameter Identification Using Integral Concurrent Learning},
Author = {Z. Bell and A. Parikh and J. Nezvadovitz and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2016},
Pages = {389-394},
Keywords = {robotpub, learning, aeropub},
Owner = {wdixon},
Timestamp = {2018.01.11}
}
@InProceedings{Bell.Chen.ea2017,
Title = {Single Scene and Path Reconstruction with a Monocular Camera Using Integral Concurrent Learning},
Author = {Z. I. Bell and H.-Y. Chen and A. Parikh and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2017},
Pages = {3670-3675},
Keywords = {robotpub, vision estimation},
Owner = {wdixon},
Timestamp = {2018.01.11}
}
@InProceedings{Bell.Harris.ea2019,
author = {Z. I. Bell and C. Harris and R. Sun and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Structure and Velocity Estimation of a Moving Object via Synthetic Persistence by a Network of Stationary Cameras},
year = {2019},
address = {Nice, Fr},
month = {Dec.},
pages = {1601-1606},
keywords = {robotpub, vision estimation, Runhan},
owner = {wdixon},
}
@Article{Bellman.Cheng.ea2016,
Title = {Switched Control of Cadence During Stationary Cycling Induced by Functional Electrical Stimulation},
Author = {M. J. Bellman and T. -H. Cheng and R. J. Downey and C. J. Hass and W. E. Dixon},
Journal = {IEEE Trans. Neural Syst. Rehabil. Eng.},
Year = {2016},
Number = {12},
Pages = {1373-1383},
Volume = {24},
Keywords = {NMES, switched, cycle},
Owner = {wdixon},
Timestamp = {2016.12.07},
Url1 = {http://ncr.mae.ufl.edu/papers/TNSRE16.pdf}
}
@InProceedings{Bellman.Cheng.ea2014a,
Title = {Cadence Control of Stationary Cycling Induced by Switched Functional Electrical Stimulation Control},
Author = {M. J. Bellman and T.-H. Cheng and R. Downey and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2014},
Keywords = {NMES, cycle, switched},
Owner = {wdixon},
Timestamp = {2016.03.15}
}
@InProceedings{Bellman.Cheng.ea2014,
Title = {Stationary Cycling Induced by Switched Functional Electrical Stimulation Control},
Author = {M. J. Bellman and T.-H. Cheng and R. J. Downey and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2014},
Pages = {4802-4809},
Keywords = {NMES, cycle, switched},
Owner = {wdixon},
Timestamp = {2016.03.15}
}
@Article{Bellman.Downey.ea2017,
Title = {Automatic Control of Cycling Induced by Functional Electrical Stimulation with Electric Motor Assistance},
Author = {M. J. Bellman and R. J. Downey and A. Parikh and W. E. Dixon},
Journal = {IEEE Trans. Autom. Science Eng.},
Year = {2017},
Month = {April},
Number = {2},
Pages = {1225-1234},
Volume = {14},
Doi = {10.1109/TASE.2016.2527716.},
Keywords = {NMES, cycle, switched},
Owner = {wdixon},
Timestamp = {2017.04.12},
Url1 = {http://ncr.mae.ufl.edu/papers/TASE17.pdf}
}
@PhdThesis{Bhasin2011b,
author = {S. Bhasin},
school = {University of Florida},
title = {Reinforcement Learning and Optimal Control Methods for Uncertain Nonlinear Systems},
year = {2011},
keywords = {RISE, Optimal, delay, NN, theory, learning, fault},
timestamp = {2017.05.17},
Url1 = {http://ncr.mae.ufl.edu/dissertations/bhasin.pdf}
}
@InBook{Bhasin2008,
Title = {Robot Manipulators},
Author = {S. Bhasin and K. Dupree and W. E. Dixon},
Chapter = {Control of Robotic Systems Undergoing a Non-Contact to Contact Transition},
Editor = {M. Ceccarelli},
Pages = {113-136},
Publisher = {In-Tech},
Year = {2008},
ISSN = {9789537619060},
Keywords = {robotpub},
Timestamp = {2017.05.08},
Url = {http://books.i-techonline.com/downloadpdf.php?id=5583}
}
@InProceedings{Bhasin2008a,
author = {S. Bhasin and K. Dupree and P. Patre and W. E. Dixon},
booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
title = {Neural Network Control of a Robot Interacting with an Uncertain Hunt-Crossley Viscoelastic Environment},
year = {2008},
address = {Ann Arbor, Michigan},
month = {Sep.},
keywords = {RISE, Robotpub, NN, learning},
timestamp = {2017.05.08},
}
@Article{Bhasin2011a,
author = {S. Bhasin and K. Dupree and P. M. Patre and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Technol.},
title = {Neural Network Control of a Robot Interacting with an Uncertain Viscoelastic Environment},
year = {2011},
number = {4},
pages = {947-955},
volume = {19},
keywords = {Robotpub, Impact, NN, theory},
timestamp = {2017.05.08},
url = {http://ncr.mae.ufl.edu/papers/CST11.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/CST11.pdf},
}
@InProceedings{Bhasin2009,
author = {S. Bhasin and K. Dupree and Z. D. Wilcox and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Adaptive Control of a Robotic System Undergoing a Non-Contact to Contact Transition with a Viscoelastic Environment},
year = {2009},
address = {St. Louis, Missouri},
month = {Jun.},
pages = {3506-3511},
keywords = {Robotpub, Impact},
timestamp = {2017.05.08},
}
@InProceedings{Bhasin2010b,
author = {S. Bhasin and M. Johnson and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {A model-free robust policy iteration algorithm for optimal control of nonlinear systems},
year = {2010},
address = {Atlanta, GA},
pages = {3060-3065},
keywords = {Optimal, NN, theory, learning},
}
@Article{Bhasin.Kamalapurkar.ea2013b,
author = {S. Bhasin and R. Kamalapurkar and H. T. Dinh and W.E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Robust identification-based state derivative estimation for nonlinear systems},
year = {2013},
month = {Jan.},
number = {1},
pages = {187-192},
volume = {58},
keywords = {RISE, NN, theory, fault},
url1 = {http://ncr.mae.ufl.edu/papers/tac12_4.pdf},
}
@Article{Bhasin.Kamalapurkar.ea2013a,
author = {Shubhendu Bhasin and Rushikesh Kamalapurkar and Marcus Johnson and Kyriakos G. Vamvoudakis and Frank L. Lewis and Warren E. Dixon},
journal = {Automatica},
title = {A novel actor-critic-identifier architecture for approximate optimal control of uncertain nonlinear systems},
year = {2013},
month = {Jan.},
number = {1},
pages = {89-92},
volume = {49},
keywords = {RISE, Optimal, NN, theory, learning},
owner = {wdixon},
timestamp = {2012.07.30},
url1 = {http://ncr.mae.ufl.edu/papers/auto13.pdf},
}
@InBook{Bhasin.Kamalapurkar.ea2013,
author = {Shubhendu Bhasin and Rushikesh Kamalapurkar and Marcus Johnson and Kyriakos G. Vamvoudakis and Frank L. Lewis and Warren E. Dixon},
chapter = {An Actor-Critic-Identifier Architecture for Adaptive Approximate Optimal Control},
editor = {F. L. Lewis and D. Liu},
pages = {258-278},
publisher = {Wiley and IEEE Press},
title = {Reinforcement Learning and Approximate Dynamic Programming for Feedback Control},
year = {2012},
series = {IEEE Press Series on Computational Intelligence},
keywords = {RISE, Optimal, NN, theory, learning},
owner = {wdixon},
timestamp = {2013.12.19},
}
@InProceedings{Bhasin2010,
author = {S. Bhasin and P. Patre and Z. Kan and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Control of a Robot Interacting with an Uncertain Viscoelastic Environment with Adjustable Force Bounds},
year = {2010},
address = {Baltimore, MD},
pages = {5242-5247},
keywords = {Robotpub, Impact, Saturated, NN},
timestamp = {2017.05.08},
}
@Article{Bhasin2011,
author = {S. Bhasin and N. Sharma and P. Patre and W. E. Dixon},
journal = {J. Control Theory Appl.},
title = {Asymptotic Tracking by a Reinforcement Learning-Based Adaptive Critic Controller},
year = {2011},
number = {3},
pages = {400-409},
volume = {9},
keywords = {RISE, NN, theory, learning},
url1 = {http://ncr.mae.ufl.edu/papers/JCTA11.pdf},
}
@InProceedings{Bhasin2010a,
author = {S. Bhasin and N. Sharma and P. Patre and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Robust Asymptotic Tracking of a Class of Nonlinear Systems using an Adaptive Critic Based Controller},
year = {2010},
address = {Baltimore, MD},
pages = {3223-3228},
keywords = {RISE, NN, theory, learning},
}
@PhdThesis{Bialy2014,
author = {B. Bialy},
school = {University of Florida},
title = {Lyapunov-Based Control of Limit Cycle Oscillations in Uncertain Aircraft Systems},
year = {2014},
keywords = {RISE, LCO, Saturated, NN, aeropub},
owner = {wdixon},
timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/bialy.pdf},
}
@InProceedings{Bialy.Andrews.ea2013,
author = {B. Bialy and L. Andrews and J. Curtis and W. E. Dixon},
booktitle = {Proc. AIAA Guid., Navig., Control Conf., AIAA 2013-4529},
title = {Saturated {RISE} Tracking Control of Store-Induced Limit Cycle Oscillations},
year = {2013},
month = {Aug.},
keywords = {RISE, LCO, Saturated, NN, aeropub},
owner = {wdixon},
timestamp = {2017.05.08},
}
@Article{Bialy.Andrews.ea2014,
author = {B. Bialy and L. Andrews and J. W. Curtis and W. E. Dixon},
journal = {AIAA J. Guid. Control Dyn.},
title = {Saturated Tracking Control of Store-Induced Limit Cycle Oscillations},
year = {2014},
pages = {1316-1322},
volume = {37},
keywords = {RISE, LCO, Saturated, NN, aeropub},
owner = {wdixon},
timestamp = {2017.05.08},
url1 = {http://ncr.mae.ufl.edu/papers/JGCD14.pdf},
}
@Article{Bialy.Chakraborty.ea2016,
Title = {Adaptive Boundary Control of Store Induced Oscillations in a Flexible Aircraft Wing},
Author = {B. Bialy and I. Chakraborty and S. Cekic and W. E. Dixon},
Journal = {Automatica},
Year = {2016},
Pages = {230-238},
Volume = {70},
Keywords = {LCO, PDE, aeropub},
Owner = {wdixon},
Timestamp = {2017.05.08},
Url1 = {http://ncr.mae.ufl.edu/papers/auto163.pdf}
}
@InProceedings{Bialy.Klotz.ea2013,
author = {B. Bialy and J. Klotz and K. Brink and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Lyapunov-Based Robust Adaptive Control of a Quadrotor {UAV} in the Presence of Modeling Uncertainties},
year = {2013},
address = {Washington, DC},
month = {Jun.},
pages = {13-18},
keywords = {RISE, Robotpub, UAV, aeropub},
owner = {wdixon},
timestamp = {2017.05.08},
}
@InProceedings{Bialy.Klotz.ea2012,
Title = {An Adaptive Backstepping Controller for a Hypersonic Air-Breathing Missile},
Author = {B. J. Bialy and J. Klotz and J. W. Curtis and W. E. Dixon},
Booktitle = {Proc. AIAA Guid., Navig., Control Conf., AIAA-2012-4468},
Year = {2012},
Keywords = {Hypersonic, aeropub},
Owner = {Brendan},
Timestamp = {2017.05.08}
}
@Article{Bialy.Pasiliao.ea2014,
Title = {Lyapunov-Based Tracking Control of Store-Induced Limit Cycle Oscillations in an Airfoil Section},
Author = {B. J. Bialy and Crystal L. Pasiliao and H. T. Dinh and W. E. Dixon},
Journal = {ASME J. Dyn. Syst. Meas. Control},
Year = {2014},
Month = {Nov.},
Number = {6},
Volume = {136},
Keywords = {RISE, aeropub},
Owner = {wdixon},
Timestamp = {2017.05.09},
Url1 = {http://ncr.mae.ufl.edu/papers/jdsmc14.pdf}
}
@InProceedings{Bialy.Pasiliao.ea2012,
author = {B. J. Bialy and C. L. Pasiliao and H. T. Dinh and W. E. Dixon},
booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
title = {Lyapunov-Based Tracking of Store-Induced Limit Cycle Oscillations in an Aeroelastic System},
year = {2012},
address = {Fort Lauderdale, Florida},
month = {Oct.},
keywords = {RISE, aeropub},
owner = {Brendan Bialy},
timestamp = {2017.05.08},
}
@MastersThesis{Bouillon2013a,
author = {F. Bouillon},
school = {University of Florida},
title = {Measure, Modeling and Compensation of Fatigue Induced Delay During Neuromuscular Electrical Stimulation},
year = {2013},
keywords = {RISE, NMES, delay, NN, theory},
owner = {wdixon},
timestamp = {2017.05.08},
}
@Article{Braganza2008,
Title = {Tracking Control for Robot Manipulators with Kinematic and Dynamic Uncertainty},
Author = {D. Braganza and W. E. Dixon and D. M. Dawson and B. Xian},
Journal = {Int. J. Robot. Autom.},
Year = {2008},
Pages = {117-126},
Volume = {23},
Keywords = {Robotpub},
Timestamp = {2017.05.08},
Url1 = {http://ncr.mae.ufl.edu/papers/IJRA08.pdf}
}
@InProceedings{Braganza2005,
Title = {Tracking Control for Robot Manipulators with Kinematic and Dynamic Uncertainty},
Author = {D. Braganza and W. E. Dixon and D. M. Dawson and B. Xian},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2005},
Address = {Seville, Spain},
Month = {Dec.},
Pages = {5293-5297},
Keywords = {Robotpub},
Timestamp = {2017.05.08}
}
@InProceedings{Cannataro.Kan.ea2016,
Title = {Followers Distribution Algorithms for Leader-Follower Networks},
Author = {B. Cannataro and Z. Kan and W. E. Dixon},
Booktitle = {IEEE Multi-Conf. Syst. and Control},
Year = {2016},
Keywords = {networkpub},
Owner = {wdixon},
Timestamp = {2017.05.08}
}
@InProceedings{Causey2007,
Title = {Dynamic Target State Estimation for Autonomous Aerial Vehicles using a Monocular Camera System},
Author = {R. S. Causey and S. S. Mehta and R. Lind and W. E. Dixon},
Booktitle = {SAE AeroTech Congr. Exhib.},
Year = {2007},
Address = {Los Angeles, CA},
Month = {Sep.},
Keywords = {UAV, robotpub, vision estimation, aeropub},
Timestamp = {2017.05.08}
}
@PhdThesis{Chakraborty2017,
Title = {Partial Differential Equation Based Control of Nonlinear Systems With Input Delays},
Author = {I. Chakraborty},
School = {University of Florida},
Year = {2017},
Keywords = {aeropub, theory, delay},
Owner = {wdixon},
Timestamp = {2017.11.27},
Url1 = {http://ncr.mae.ufl.edu/dissertations/Indra2017.pdf}
}
@InProceedings{Chakraborty.Mehta.ea2016,
Title = {Compensating for Time-Varying Input and State Delays Inherent to Image-Based Control Systems},
Author = {I. Chakraborty and S. Mehta and J. W. Curtis and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2016},
Pages = {78-83},
Keywords = {vision estimation, aeropub, theory},
Timestamp = {2017.07.12}
}
@InProceedings{Chakraborty.Mehta.ea2017,
Title = {2.5{D} Visual Servo Control in the Presence of Time-Varying State and Input Delays},
Author = {I. Chakraborty and S. Mehta and E. Doucette and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2017},
Keywords = {vision, theory, delay},
Owner = {wdixon},
Timestamp = {2017.05.08}
}
@InProceedings{Chakraborty.Mehta.ea2017a,
Title = {Control of an Input Delayed Uncertain Nonlinear System with Adaptive Delay Estimation},
Author = {I. Chakraborty and S. Mehta and E. Doucette and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2017},
Keywords = {delay, theory},
Owner = {wdixon},
Timestamp = {2017.05.08}
}
@InProceedings{Chakraborty.Obuz.ea2016a,
Title = {Control of an Uncertain Nonlinear System with Known Time-Varying Input Delays with Arbitrary Delay Rates},
Author = {I. Chakraborty and S. Obuz and W. E. Dixon},
Booktitle = {Proc. IFAC Symp. on Nonlinear Control Sys.},
Year = {2016},
Keywords = {delay, PDE, theory},
Owner = {wdixon},
Timestamp = {2017.05.08}
}
@InProceedings{Chakraborty.Obuz.ea2016b,
Title = {Image-Based Tracking Control in the Presence of Time-Varying Input and State Delays},
Author = {I. Chakraborty and S. Obuz and W. E. Dixon},
Booktitle = {IEEE Multi-Conf. Syst. and Control},
Year = {2016},
Keywords = {vision control, delay, pde, theory},
Owner = {wdixon},
Timestamp = {2017.05.08}
}
@InProceedings{Chakraborty.Obuz.ea2016,
Title = {Control of an Uncertain Euler-Lagrange System with Known Time-Varying Input Delay: A PDE-Based Approach},
Author = {I. Chakraborty and S. Obuz and R. Licitra and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2016},
Pages = {4344-4349},
Keywords = {delay, PDE, theory},
Timestamp = {2017.05.08}
}
@PhdThesis{Chen2018,
Title = {A Switched Systems Framework For Nonlinear Dynamic Systems With Intermittent State Feedback},
Author = {Hsi-Yuan Chen},
School = {University of Florida},
Year = {2018},
Keywords = {theory, robotpub, Vision Estimation, switched},
Url1 = {http://ncr.mae.ufl.edu/dissertations/StevenChen2018.pdf}
}
@Article{Chen.Bell.ea2019,
Title = {A Switched Systems Approach to Path Following with Intermittent State Feedback},
Author = {H.-Y. Chen and Z. Bell and P. Deptula and W. E. Dixon},
Journal = {IEEE Trans. Robot.},
Year = {2019},
Number = {3},
Pages = {725-733},
Volume = {35},
Keywords = {robotpub, theory},
Url1 = {http://ncr.mae.ufl.edu/papers/tro19.pdf}
}
@Article{Chen.Bell.ea2018,
Title = {A Switched Systems Framework for Path Following with Intermittent State Feedback},
Author = {H.-Y. Chen and Z. I. Bell and P. Deptula and W. E. Dixon},
Journal = {IEEE Control Syst. Lett.},
Year = {2018},
Month = oct,
Number = {4},
Pages = {749-754},
Volume = {2},
Keywords = {vision estimation, switched, robotpub},
Owner = {wdixon},
Timestamp = {2018.06.01},
Url1 = {http://ncr.mae.ufl.edu/papers/CSL18_3.pdf}
}
@InProceedings{Chen.Bell.ea2017,
author = {H.-Y. Chen and Z. I. Bell and R. Licitra and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Switched Systems Approach to Vision-Based Tracking Control of Wheeled Mobile Robots},
year = {2017},
pages = {4902-4907},
keywords = {robotpub},
owner = {wdixon},
timestamp = {2018.01.11},
}
@InProceedings{Chen2003c,
author = {J. Chen and A. Behal and D. M. Dawson and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Adaptive Visual Servoing in the Presence of Intrinsic Calibration Uncertainty},
year = {2003},
address = {Maui, Hawaii USA},
month = {Dec.},
pages = {5396-5401},
keywords = {Robotpub, vision control},
timestamp = {2017.05.09},
}
@Article{Chen.Dawson.ea2005,
Title = {Adaptive Homography-Based Visual Servo Tracking for Fixed and Camera-in-Hand Configurations},
Author = {J. Chen and D. M. Dawson and W. E. Dixon and A. Behal},
Journal = {IEEE Trans. Control Syst. Technol.},
Year = {2005},
Pages = {814-825},
Volume = {13},
Keywords = {Robotpub, vision control},
Timestamp = {2017.05.08},
Url = {http://ncr.mae.ufl.edu/papers/cst05.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/cst05.pdf}
}
@InProceedings{Chen2003,
Title = {Adaptive Homography-Based Visual Servo Tracking},
Author = {J. Chen and D. M. Dawson and W. E. Dixon and A. Behal},
Booktitle = {Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst.},
Year = {2003},
Address = {Las Vegas, Nevada},
Month = {Oct.},
Pages = {230-235},
Keywords = {Robotpub, vision control},
Timestamp = {2017.05.08}
}
@Article{Chen2007,
author = {J. Chen and D. M. Dawson and W. E. Dixon and V. Chitrakaran},
journal = {Automatica},
title = {Navigation Function Based Visual Servo Control},
year = {2007},
pages = {1165-1177},
volume = {43},
keywords = {Robotpub, vision control},
timestamp = {2017.05.09},
url = {http://ncr.mae.ufl.edu/papers/auto07.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/auto07.pdf},
}
@InProceedings{Chen2005b,
author = {J. Chen and D. M. Dawson and W. E. Dixon and V. Chitrakaran},
booktitle = {Proc. Am. Control Conf.},
title = {Navigation Function Based Visual Servo Control},
year = {2005},
address = {Portland, Oregon},
month = {Jun.},
pages = {3682-3687},
keywords = {Robotpub, vision control},
timestamp = {2017.05.09},
}
@InProceedings{Chen2004,
author = {J. Chen and D. M. Dawson and W. E. Dixon and V. Chitrakaran},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {An Optimization-Based Approach for Fusing Image-Based Trajectory Generation with Position-Based Visual Servo Control},
year = {2004},
address = {Paradise Island, Bahamas},
month = {Dec.},
pages = {4034-4039},
keywords = {Robotpub, Optimal, vision control},
timestamp = {2017.05.09},
}
@InProceedings{Chen2004a,
author = {J. Chen and W. E. Dixon and D. M. Dawson and V. Chitrakaran},
booktitle = {Proc. IEEE Conf. Control Appl.},
title = {Visual Servo Tracking Control of a Wheeled Mobile Robot with a Monocular Fixed Camera},
year = {2004},
address = {Taipei, Taiwan},
keywords = {Robotpub, WMR, vision control},
timestamp = {2017.05.09},
}
@InProceedings{Chen2005a,
author = {J. Chen and W. E. Dixon and D. M. Dawson and T. Galluzzo},
booktitle = {Proc. IEEE/ASME Int. Conf. Adv. Intell. Mechatron.},
title = {Navigation and Control of a Wheeled Mobile Robot},
year = {2005},
address = {Monterey, CA},
month = {Jul.},
pages = {1145-1150},
keywords = {Robotpub, WMR},
timestamp = {2017.05.09},
}
@InProceedings{Chen2003a,
author = {J. Chen and W. E. Dixon and D. M. Dawson and M. McIntire},
booktitle = {Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst.},
title = {Homography-Based Visual Servo Tracking Control of a Wheeled Mobile Robot},
year = {2003},
address = {Las Vegas, Nevada},
month = {Oct.},
pages = {1814-1819},
keywords = {Robotpub, WMR, vision control},
timestamp = {2017.05.08},
}
@Article{Chen2006,
author = {J. Chen and W. E. Dixon and D. M. Dawson and M. McIntyre},
journal = {IEEE Trans. Robot.},
title = {Homography-Based Visual Servo Tracking Control of a Wheeled Mobile Robot},
year = {2006},
pages = {406-415},
volume = {22},
keywords = {Robotpub, WMR, vision control},
timestamp = {2017.05.09},
url = {http://ncr.mae.ufl.edu/papers/tr06.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tr06.pdf},
}
@InProceedings{Chen2002,
Title = {Exponential Tracking Control of a Hydraulic Proportional Directional Valve and Cylinder via Integrator Backstepping},
Author = {J. Chen and W. E. Dixon and J. R. Wagner and D. M. Dawson},
Booktitle = {Proc. ASME Int. Mech. Eng. Congr. Expo.},
Year = {2002},
Month = {Nov.},
Keywords = {robotpub}
}
@Article{Cheng.Kan.ea2017,
author = {T. H. Cheng and Z. Kan and J. R. Klotz and J. M. Shea and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Event-Triggered Control of Multi-Agent Systems for Fixed and Time-Varying Network Topologies},
year = {2017},
number = {10},
pages = {5365-5371},
volume = {62},
keywords = {Robotpub, Networkpub, theory},
owner = {wdixon},
timestamp = {2017.09.28},
url1 = {http://ncr.mae.ufl.edu/papers/TAC17b.pdf},
}
@Article{Cheng.Wang.ea2016,
author = {T. H. Cheng and Q. Wang and R. Kamalapurkar and H. T. Dinh and M. J. Bellman and W. E. Dixon},
journal = {IEEE Trans. Cybern.},
title = {Identification-based Closed-loop NMES Limb Tracking with Amplitude-Modulated Control Input},
year = {2016},
month = {July},
number = {7},
pages = {1679-1690},
volume = {46},
keywords = {NMES, NN, switched},
owner = {wdixon},
timestamp = {2016.06.28},
url1 = {http://ncr.mae.ufl.edu/papers/cyber16.pdf},
}
@PhdThesis{Cheng2015,
Title = {Lyapunov-Based Switched Systems Control},
Author = {T.-H. Cheng},
School = {University of Florida},
Year = {2015},
Keywords = {switched, networkpub, theory},
Owner = {wdixon},
Timestamp = {2017.05.09},
url1 = {http://ncr.mae.ufl.edu/dissertations/cheng2015.pdf},
}
@InProceedings{Cheng.Downey.ea2013,
Title = {Robust output feedback control of uncertain switched Euler-Lagrange systems},
Author = {T.-H. Cheng and R. Downey and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2013},
Address = {Florence, IT},
Month = {Dec.},
Pages = {4668-4673},
Keywords = {Robotpub, theory},
Owner = {wdixon},
Timestamp = {2017.05.09}
}
@InProceedings{Cheng.Kan.ea2015,
author = {Teng-Hu Cheng and Zhen Kan and Justin Klotz and John Shea and Warren E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Decentralized Event-Triggered Control of Networked Systems- {P}art 1: Leader-Follower Consensus Under Switching},
year = {2015},
pages = {5438-5443},
keywords = {Robotpub, Networkpub, theory},
owner = {wdixon},
timestamp = {2017.05.09},
}
@InProceedings{Cheng.Kan.ea2015a,
author = {Teng-Hu Cheng and Zhen Kan and Justin Klotz and John Shea and Warren E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Decentralized Event-Triggered Control of Networked Systems- {P}art 2: Containment Control},
year = {2015},
pages = {5444-5448},
keywords = {Robotpub, Networkpub, theory},
owner = {wdixon},
timestamp = {2017.05.09},
}
@InProceedings{Cheng.Kan.ea2014,
author = {T.-H. Cheng and Z. Kan and J. A. Rosenfeld and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Decentralized formation control with connectivity maintenance and collision avoidance under limited and intermittent sensing},
year = {2014},
pages = {3201-3206},
keywords = {Robotpub, Networkpub, theory},
owner = {wdixon},
timestamp = {2017.05.09},
}
@InProceedings{Cheng.Kan.ea2014a,
author = {T.-H. Cheng and Z. Kan and J. Shea and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Decentralized Event-Triggered Control for Leader-follower Consensus},
year = {2014},
address = {Los Angeles, CA},
pages = {1244-1249},
keywords = {Robotpub, Networkpub, theory},
owner = {wdixon},
timestamp = {2017.05.09},
}
@InProceedings{Chitrakaran2005a,
Title = {Structure From Motion: A Lyapunov-Based Nonlinear Estimation Approach},
Author = {V. Chitrakaran and D. M. Dawson and J. Chen and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2005},
Address = {Portland, Oregon},
Month = {Jun.},
Pages = {4601-4606},
Keywords = {vision estimation},
Timestamp = {2017.05.09}
}
@Article{Chitrakaran2005,
Title = {Identification of a Moving Object's Velocity with a Fixed Camera},
Author = {V. Chitrakaran and D. M. Dawson and W. E. Dixon and J. Chen},
Journal = {Automatica},
Year = {2005},
Pages = {553-562},
Volume = {41},
Keywords = {vision estimation},
Timestamp = {2017.05.09},
Url = {http://ncr.mae.ufl.edu/papers/auto05.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/auto05.pdf}
}
@InProceedings{Chitrakaran2003,
Title = {Identification of a Moving Object's Velocity with a Fixed Camera},
Author = {V. Chitrakaran and D. M. Dawson and W. E. Dixon and J. Chen},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2003},
Address = {Maui, Hawaii USA},
Month = {Dec.},
Pages = {5402-5407},
Keywords = {vision estimation},
Timestamp = {2017.05.09}
}
@Article{Chwa.Dani.ea2016,
author = {D. Chwa and A. Dani and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Tech.},
title = {Range and Motion Estimation of a Monocular Camera using Static and Moving Objects},
year = {2016},
month = {July},
number = {4},
pages = {1174-1183},
volume = {24},
keywords = {RISE, vision estimation},
owner = {wdixon},
timestamp = {2017.05.09},
url1 = {http://ncr.mae.ufl.edu/papers/cst162.pdf},
}
@InProceedings{Chwa.Dani.ea2012,
author = {Chwa, D. and Dani, A. and Kim, H. and W. E. Dixon},
booktitle = {Proc. of the IEEE Int. Conf. on Systems, Man, and Cybernetics},
title = {Camera Motion Estimation for 3-D Structure Reconstruction of Moving Objects},
year = {2012},
pages = {1788-1793},
keywords = {RISE, vision estimation},
owner = {wdixon},
timestamp = {2017.05.09},
}
@PhdThesis{Cousin2019,
Title = {Hybrid Exoskeletons For Rehabilitation: A Nonlinear Control Approach},
Author = {C. A. Cousin},
School = {University of Florida},
Year = {2019},
Keywords = {NMES, FES, robotpub},
Url1 = {http://ncr.mae.ufl.edu/dissertations/cousin_diss19.pdf}
}
@InProceedings{Cousin.Duenas.ea2018c,
Title = {Admittance Control of Motorized Functional Electrical Stimulation Cycle},
Author = {C. A. Cousin and V. Duenas and C. Rouse and W. E. Dixon},
Booktitle = {Proc. IFAC Conf. Cyber. Phys. Hum. Syst.},
Year = {2018},
Pages = {328-333},
Keywords = {FES, NMES}
}
@Article{Cousin.Rouse.ea2019,
Title = {Controlling the Cadence and Admittance of a Functional Electrical Stimulation Cycle},
Author = {C. A. Cousin and C. A. Rouse and V. H. Duenas and W. E. Dixon},
Journal = {IEEE Trans. Neural Syst. Rehabil. Eng.},
Year = {2019},
Month = {June},
Number = {6},
Pages = {1181-1192},
Volume = {27},
Keywords = {FES, NMES, robotpub},
Url1 = {http://ncr.mae.ufl.edu/papers/tnsre19.pdf}
}
@InProceedings{Cousin.Rouse.ea2017,
Title = {Position and Torque Control via Rehabilitation Robot and Functional Electrical Stimulation},
Author = {C. A. Cousin and C. A. Rouse and V. H. Duenas and W. E. Dixon},
Booktitle = {IEEE Int. Conf. Rehabil. Robot.},
Year = {2017},
Keywords = {robotpub, NMES},
Owner = {wdixon},
Timestamp = {2017.08.02}
}
@InProceedings{Cousin.Deptula.ea2019,
Title = {Cycling With Functional Electrical Stimulation and Adaptive Neural Network Admittance Control},
Author = {C. Cousin and P. Deptula and C. Rouse and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2019},
Pages = {1742-1747},
Keywords = {NMES, FES, NN}
}
@Article{Cousin.Duenas.ea2020,
author = {C. Cousin and V. Duenas and C. Rouse and M. Bellman and P. Freeborn and E. Fox and W. E. Dixon},
journal = {IEEE Trans. Control Sys. Tech.},
title = {Closed-Loop Cadence and Instantaneous Power Control on a Motorized Functional Electrical Stimulation Cycle},
year = {2020},
month = {November},
number = {6},
pages = {2276-2291},
volume = {28},
keywords = {FES, NMES, robotpub},
url1 = {http://ncr.mae.ufl.edu/papers/cst20a.pdf},
}
@InProceedings{Cousin.Duenas.ea2018,
Title = {Admittance Trajectory Tracking using a Challenge-Based Rehabilitation Robot with Functional Electrical Stimulation},
Author = {C. Cousin and V. H. Duenas and C. Rouse and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2018},
Pages = {3732-3737},
Keywords = {robotpub, NMES},
Owner = {wdixon},
Timestamp = {2018.01.22}
}
@InProceedings{Cousin.Duenas.ea2018a,
Title = {Stable Cadence Tracking of Admitting Functional Electrical Stimulation Cycle},
Author = {C. Cousin and V. H. Duenas and C. Rouse and W. E. Dixon},
Booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
Year = {2018},
Keywords = {FES, NMES},
Owner = {wdixon},
Timestamp = {2018.06.05}
}
@InProceedings{Cousin.Duenas.ea2018b,
Title = {Cadence and Admittance Control of a Motorized Functional Electrical Stimulation Cycle},
Author = {C. Cousin and V. H Duenas and C. Rouse and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2018},
Month = dec,
Pages = {6470-6475},
Keywords = {NMES, switched, robotpub, FES}
}
@InProceedings{Cousin.Duenas.ea2017,
Title = {Motorized Functional Electrical Stimulation for Torque and Cadence Tracking: A Switched {L}yapunov Approach},
Author = {C. Cousin and V. H. Duenas and C. Rouse and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2017},
Pages = {5900-5905},
Keywords = {robotpub, NMES},
Owner = {wdixon},
Timestamp = {2018.01.11}
}
@PhdThesis{Dani2011a,
Title = {Lyapunov-Based Nonlinear Estimation Methods With Applications To Machine Vision},
Author = {A. Dani},
School = {University of Florida},
Year = {2011},
Keywords = {vision estimation, theory, RISE},
Owner = {wdixon},
Timestamp = {2017.05.17},
Url1 = {http://ncr.mae.ufl.edu/dissertations/ashwinD.pdf}
}
@Article{Dani2012,
author = {A. Dani and N. Fischer and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Single Camera Structure and Motion},
year = {2012},
month = {Jan.},
number = {1},
pages = {241-246},
volume = {57},
keywords = {RISE, vision estimation},
timestamp = {2017.05.09},
url1 = {http://ncr.mae.ufl.edu/papers/tac12.pdf},
}
@Article{DaniT.A.b,
author = {A. Dani and N. Fischer and Z. Kan and W. E. Dixon},
journal = {Mechatron.},
title = {Globally Exponentially Stable Observer for Vision-Based Range Estimation},
year = {2012},
month = {Special Issue on Visual Servoing},
number = {4},
pages = {381-389},
volume = {22},
keywords = {Robotpub, AUV, vision estimation},
timestamp = {2017.05.09},
url1 = {http://ncr.mae.ufl.edu/papers/mech12_1.pdf},
}
@InProceedings{Dani2010a,
Title = {Nonlinear Observer for Structure Estimation using a Paracatadioptric Camera},
Author = {A. Dani and N. Fischer and Z. Kan and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2010},
Address = {Baltimore, MD},
Pages = {3487-3492},
Keywords = {RISE, vision estimation},
Timestamp = {2017.05.09}
}
@InProceedings{Dani2009,
author = {A.P. Dani and N.R. Gans and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Position-Based Visual Servo Control of Leader-Follower Formation Using Image-Based Relative Pose and Relative Velocity Estimation},
year = {2009},
address = {St. Louis, Missouri},
month = {Jun.},
pages = {5271-5276},
keywords = {Robotpub, Networkpub, NN, vision estimation},
timestamp = {2017.05.09},
}
@InProceedings{Dani2011,
Title = {Structure Estimation of a Moving Object Using a Moving Camera: An Unknown Input Observer Approach},
Author = {A. Dani and Z. Kan and N. Fischer and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2011},
Address = {Orlando, FL},
Pages = {5005-5012},
Keywords = {vision estimation}
}
@InProceedings{Dani2010b,
Title = {Structure and Motion Estimation of a Moving Object Using a Moving Camera},
Author = {A. Dani and Z. Kan and N. Fischer and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2010},
Address = {Baltimore, MD},
Pages = {6962-6967},
Keywords = {vision estimation}
}
@InProceedings{Dani2010,
author = {A. Dani and K. El Rifai and W. E. Dixon},
booktitle = {Proc. IEEE Int. Symp. Intell. Control},
title = {Globally Exponentially Convergent Observer for Vision-based Range Estimation},
year = {2010},
address = {Yokohama, Japan},
month = {Sep.},
pages = {801-806},
keywords = {Robotpub, vision estimation},
timestamp = {2017.05.09},
}
@InBook{DaniBookChapter,
Title = {Visual Servoing via Advanced Numerical Methods},
Author = {A. P. Dani and W. E. Dixon},
Chapter = {Single Camera Structure and Motion Estimation},
Editor = {G. Chesi and K. Hashimoto},
Pages = {209-229},
Publisher = {Springer},
Year = {2010},
Series = {Lec. Notes in Contr. Inform. Sci.},
Volume = {401},
ISSN = {9781849960885},
Keywords = {vision control},
Timestamp = {2017.05.09},
Url = {http://www.springer.com/engineering/control/book/978-1-84996-088-5}
}
@InBook{Dani.Kan.ea2012,
Title = {Robotic Vision: Technologies for Machine Learning and Vision Applications},
Author = {A. P. Dani and Z. Kan and N. Fischer and W. E. Dixon},
Chapter = {Real-time Structure and Motion Estimation in Dynamic Scenes using a Single Camera},
Editor = {J. Garcia-Rodriguez and M. C. Quevedo},
Pages = {173-191},
Publisher = {IGI Global Publication},
Year = {2012},
Month = {Jul.},
Doi = {10.4018/978-1-4666-2672-0.ch011},
Keywords = {robotpub, vision, theory},
Owner = {wdixon},
Timestamp = {2017.05.09}
}
@InProceedings{Dani2008,
author = {A. P. Dani and S. Velat and C. Crane and N. R. Gans and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Control Appl.},
title = {Experimental Results for an Image-Based Pose and Velocity Estimation Method},
year = {2008},
address = {San Antonio, Texas},
month = {Sep.},
pages = {1159-1164},
keywords = {RISE, vision estimation},
timestamp = {2017.05.09},
}
@PhdThesis{Deptula2019,
Title = {Data-Based Reinforcement Learning: Approximate Optimal Control For Uncertain Nonlinear Systems},
Author = {P Deptula},
School = {University of Florida},
Year = {2019},
Keywords = {Optimal, NN, Learning, robotpub, theory},
Url1 = {http://ncr.mae.ufl.edu/dissertations/deptula2019.pdf}
}
@Article{Deptula.Bell.ea2020,
author = {P. Deptula and Z. Bell and E. Doucette and W. J. Curtis and W. E. Dixon},
journal = {Automatica},
title = {Data-Based Reinforcement Learning Approximate Optimal Control for an Uncertain Nonlinear System with Control Effectiveness Faults},
year = {2020},
month = {June},
pages = {1-10},
volume = {116},
keywords = {Optimal, NN, Learning, robotpub, theory, RT2, jointAF},
url1 = {http://ncr.mae.ufl.edu/papers/Auto20b.pdf},
}
@InProceedings{Deptula.Bell.ea2018,
author = {P. Deptula and Z. I. Bell and E. Doucette and J. W. Curtis and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Data-Based Reinforcement Learning Approximate Optimal Control for an Uncertain Nonlinear System with Partial Loss of Control Effectiveness},
year = {2018},
pages = {2521-2526},
keywords = {Optimal, NN, theory, learning},
owner = {wdixon},
timestamp = {2018.01.22},
}
@InProceedings{Deptula.Bell.ea2018a,
Title = {Single Agent Indirect Herding via Approximate Dynamic Programming},
Author = {P. Deptula and Z. I. Bell and F. Zegers and R. Licitra and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2018},
Month = dec,
Pages = {7136-7141},
Keywords = {robotpub, herding, adaptive, optimal theory}
}
@Article{Deptula.Chen.ea2020,
author = {P. Deptula and H.-Y. Chen and R. Licitra and J. Rosenfeld and W. E. Dixon},
journal = {IEEE Trans. Robotics},
title = {Approximate Optimal Motion Planning to Avoid Unknown Moving Avoidance Regions},
year = {2020},
number = {2},
pages = {414-430},
volume = {36},
keywords = {Optimal, NN, Learning, robotpub, theory},
url1 = {http://ncr.mae.ufl.edu/papers/tro2020.pdf},
}
@InProceedings{Deptula.Licitra.ea2018,
author = {P. Deptula and R. Licitra and J. A. Rosenfeld and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Online Approximate Optimal Path-Planner in the Presence of Mobile Avoidance Regions},
year = {2018},
pages = {2515-2520},
keywords = {robotpub, Optimal, NN, theory},
owner = {wdixon},
timestamp = {2018.01.22},
}
@Article{Deptula.Rosenfeld.ea2018,
Title = {Approximate Dynamic Programming: Combining Regional and Local State Following Approximations},
Author = {P. Deptula and J. Rosenfeld and R. Kamalapurkar and W. E. Dixon},
Journal = {IEEE Trans. Neural Netw. Learn. Syst.},
Year = {2018},
Month = {June},
Number = {6},
Pages = {2154-2166},
Volume = {29},
Keywords = {Optimal, NN, Learning, robotpub, theory},
Owner = {wdixon},
Timestamp = {2018.05.17},
Url1 = {http://ncr.mae.ufl.edu/papers/TNNLS18.pdf}
}
@InProceedings{Dinh2010,
author = {H. Dinh and S. Bhasin and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Dynamic Neural Network-based Robust Identification and Control of a class of nonlinear Systems},
year = {2010},
address = {Atlanta, GA},
pages = {5536-5541},
keywords = {RISE, NN, theory, learning},
}
@Article{Dinh.Bhasin.ea2017,
Title = {Dynamic Neural Network-Based Output Feedback Tracking Control for Uncertain Nonlinear Systems},
Author = {H. Dinh and S. Bhasin and R. Kamalapurkar and W. E. Dixon},
Journal = {ASME J. Dyn. Syst. Meas. Control},
Year = {2017},
Month = {July},
Number = {7},
Pages = {074502-1-074502-7},
Volume = {139},
Keywords = {learning, NN, OFB, robotpub, theory},
Owner = {wdixon},
Timestamp = {2017.08.02},
Url1 = {http://ncr.mae.ufl.edu/papers/JDSMC17_2.pdf}
}
@PhdThesis{Dinh2012,
author = {H. T. Dinh},
school = {University of Florida},
title = {Dynamic Neural Network-Based Robust Control Methods for Uncertain Nonlinear Systems},
year = {2012},
keywords = {RISE, NN, theory, learning},
owner = {wdixon},
timestamp = {2017.05.09},
url1 = {http://ncr.mae.ufl.edu/dissertations/huyen.pdf},
}
@InProceedings{Dinh.Bhasin.ea2012,
author = {Dinh, H. T. and S. Bhasin and D. Kim and W. E. Dixon},
booktitle = {American Control Conference},
title = {Dynamic Neural Network-based Global Output Feedback Tracking Control for Uncertain Second-Order Nonlinear Systems},
year = {2012},
address = {Montr\'{e}al, Canada},
month = {Jun.},
pages = {6418-6423},
keywords = {Robotpub, NN, theory},
timestamp = {2017-07-06},
}
@InProceedings{Dinh.Fischer.ea2013a,
author = {H. T. Dinh and N. Fischer and R. Kamalapurkar and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Output Feedback Control for Uncertain Nonlinear Systems with Slowly Varying Input Delay},
year = {2013},
address = {Washington, DC},
month = {Jun.},
pages = {1748-1753},
keywords = {NN, theory, delay},
owner = {wdixon},
timestamp = {2017.05.09},
}
@Article{Dinh.Kamalapurkar.ea2014,
author = {H. T. Dinh and R. Kamalapurkar and S. Bhasin and W. E. Dixon},
journal = {Neural Netw.},
title = {Dynamic Neural Network-based Robust Observers for Uncertain Nonlinear Systems},
year = {2014},
month = {Dec.},
pages = {44-52},
volume = {60},
keywords = {NN, theory},
owner = {wdixon},
timestamp = {2017.05.09},
url1 = {http://ncr.mae.ufl.edu/papers/nn14.pdf},
}
@InProceedings{Dinh2011,
author = {H. T. Dinh and R. Kamalapurkar and S. Bhasin and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Dynamic Neural Network-based Robust Observers for Second-order Uncertain Nonlinear Systems},
year = {2011},
address = {Orlando, FL},
pages = {7543-7548},
keywords = {NN, theory},
timestamp = {2017.05.09},
}
@InBook{Dixon2020a,
author = {Dixon, W. E.},
editor = {J. Baillieul and T. Samad},
chapter = {Intermittent Image-Based Estimation},
pages = {1-4},
publisher = {Springer},
title = {Encyclopedia of Systems and Control},
year = {2020},
doi = {https://doi.org/10.1007/978-3-030-44184-5},
keywords = {robotpub, vision estimation},
}
@InBook{Dixon2009,
Title = {Encyclopedia of Complexity and Systems Science},
Author = {Dixon, W. E.},
Chapter = {Introduction to Complexity and Nonlinearity in Autonomous Robotics},
Pages = {1224-1226},
Publisher = {Springer},
Year = {2009},
Volume = {2},
ISSN = {9780387758886}
}
@Article{Dixon2007,
author = {Dixon, W. E.},
journal = {IEEE Trans. Autom. Control},
title = {Adaptive Regulation of Amplitude Limited Robot Manipulators with Uncertain Kinematics and Dynamics},
year = {2007},
pages = {488-493},
volume = {52},
keywords = {robotpub, theory},
url = {http://ncr.mae.ufl.edu/papers/tac07.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tac07.pdf},
}
@InProceedings{Dixon2004b,
author = {Dixon, W. E.},
booktitle = {Proc. Am. Control Conf.},
title = {Adaptive Regulation of Amplitude Limited Robot Manipulators with Uncertain Kinematics and Dynamics},
year = {2004},
address = {Boston, Massachusetts},
month = {Jun.},
pages = {3839 - 3844},
keywords = {robotpub, theory},
}
@InProceedings{Dixon2003d,
author = {Dixon, W. E.},
booktitle = {Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst.},
title = {Teach by Zooming: A Camera Independent Alternative to Teach By Showing Visual Servo Control},
year = {2003},
address = {Las Vegas, Nevada},
month = {Oct.},
pages = {749-754},
keywords = {robotpub, vision control},
}
@Book{Dixon2003,
Title = {Nonlinear Control of Engineering Systems: A Lyapunov-Based Approach},
Author = {W. E. Dixon and A. Behal and D. M. Dawson and S. Nagarkatti},
Publisher = {Birkhauser: Boston},
Year = {2003},
ISSN = {081764265X}
}
@Article{Dixon.Bellman2016,
Title = {Cycling Induced by Functional Electrical Stimulation: A Control Systems Perspective},
Author = {W. E. Dixon and M. Bellman},
Journal = {ASME Dyn. Syst. \& Control Mag.},
Year = {2016},
Month = {Sept},
Number = {3},
Pages = {3-7},
Volume = {4},
Keywords = {FES, NMES, Cycle},
Owner = {wdixon},
Timestamp = {2016.10.03},
Url1 = {http://ncr.mae.ufl.edu/papers/DSCM16.pdf}
}
@Article{Dixon2003b,
author = {W. E. Dixon and J. Chen},
journal = {IEEE Trans. Autom. Control},
title = {Comments on 'A Composite Energy Function-Based Learning Control Approach for Nonlinear Systems with Time-Varying Parametric Uncertainties'},
year = {2003},
pages = {1671-1672},
volume = {48},
keywords = {robotpub, learning, repetitive learning},
url = {http://ncr.mae.ufl.edu/papers/tac03.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tac03.pdf},
}
@InProceedings{Dixon2009a,
Title = {Motion Estimation for Improved Target Tracking with a Network of Cameras},
Author = {W. E. Dixon and C. Crane and R. Kress and F. Bzorgi},
Booktitle = {ANS Annual Meeting},
Year = {2009},
Address = {Atlanta, GA},
Keywords = {networkpub, Vision estimation}
}
@Article{Dixon2002a,
Title = {A MATLAB-Based Control Systems Laboratory Experience for Undergraduate Students: Towards Standardization and Shared Resources},
Author = {W. E. Dixon and D. M. Dawson and B. T. Costic and and M. S. de Queiroz},
Journal = {IEEE Trans. Educ.},
Year = {2002},
Pages = {218-226},
Volume = {45},
Keywords = {Matlab, networkpub},
Url = {http://ncr.mae.ufl.edu/papers/te02.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/te02.pdf}
}
@InProceedings{Dixon2001e,
author = {W. E. Dixon and D. M. Dawson and B. T. Costic and M. S. de Queiroz},
booktitle = {Proc. Am. Control Conf.},
title = {Towards the Standardization of a MATLAB-Based Control Systems Laboratory Experience for Undergraduate Students},
year = {2001},
address = {Arlington, Virginia},
month = {Jun.},
pages = {1161-1166},
keywords = {Matlab, networkpub},
}
@Article{Dixon2000b,
author = {W. E. Dixon and D. M. Dawson and E. Zergeroglu},
journal = {ASME J. Dyn. Syst. Meas. Control},
title = {Tracking and Regulation Control of a Mobile Robot System with Kinematic Disturbances: A Variable Structure-Like Approach},
year = {2000},
pages = {616-623},
volume = {122},
keywords = {Robotpub, WMR},
timestamp = {2017.05.09},
url = {http://ncr.mae.ufl.edu/papers/tasme00.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tasme00.pdf},
}
@InProceedings{Dixon2000h,
author = {W. E. Dixon and D. M. Dawson and E. Zergeroglu},
booktitle = {Proc. IEEE Conf. Control Appl.},
title = {Robust Control of a Mobile Robot System with Kinematic Disturbances},
year = {2000},
address = {Anchorage, Alaska},
month = {Sep.},
pages = {437-442},
keywords = {robotpub, WMR},
}
@Article{Dixon2001a,
author = {W. E. Dixon and D. M. Dawson and E. Zergeroglu and A. Behal},
journal = {IEEE Trans. Syst. Man Cybern. Part B Cybern.},
title = {Adaptive Tracking Control of a Wheeled Mobile Robot via an Uncalibrated Camera System},
year = {2001},
pages = {341-352},
volume = {31},
keywords = {robotpub, WMR, vision control},
url = {http://ncr.mae.ufl.edu/papers/tcyber01.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tcyber01.pdf},
}
@Book{Dixon2000,
author = {W. E. Dixon and D. M. Dawson and E. Zergeroglu and A. Behal},
publisher = {Springer-Verlag London Ltd},
title = {Nonlinear Control of Wheeled Mobile Robots},
year = {2000},
series = {Lecture Notes in Control and Information Sciences},
volume = {262},
issn = {1852334142},
keywords = {Robotpub, WMR},
timestamp = {2017.05.09},
}
@InProceedings{Dixon2000i,
author = {W. E. Dixon and D. M. Dawson and E. Zergeroglu and A. Behal},
booktitle = {Proc. Am. Control Conf.},
title = {Adaptive Tracking Control of a Wheeled Mobile Robot via an Uncalibrated Camera System},
year = {2000},
address = {Chicago, Illinois},
month = {Jun.},
pages = {1493-1497},
keywords = {robotpub, WMR, vision control},
}
@Article{Dixon2000f,
author = {W. E. Dixon and D. M. Dawson and E. Zergeroglu and F. Zhang},
journal = {Int. J. Robust Nonlinear Control},
title = {Robust Tracking and Regulation Control for Mobile Robots},
year = {2000},
pages = {199-216},
volume = {10},
keywords = {robotpub, WMR},
url = {http://ncr.mae.ufl.edu/papers/ijrnc00.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/ijrnc00.pdf},
}
@InProceedings{Dixon1999b,
Title = {Robust Tracking Control of a Mobile Robot System},
Author = {W. E. Dixon and D. M. Dawson and E. Zergeroglu and F. Zhang},
Booktitle = {Proc. IEEE Conf. Control Appl.},
Year = {1999},
Address = {Kohala Coast, Hawaii},
Month = {Aug.},
Pages = {1015-1020},
Keywords = {Robotpub, WMR},
Timestamp = {2017.05.09}
}
@Article{Dixon2000g,
author = {W. E. Dixon and D. M. Dawson and F. Zhang and E. Zergeroglu},
journal = {IEEE Trans. Syst. Man Cybern. Part B Cybern.},
title = {Global Exponential Tracking Control of A Mobile Robot System via a PE Condition},
year = {2000},
pages = {129-142},
volume = {30},
keywords = {robotpub, WMR},
url = {http://ncr.mae.ufl.edu/papers/tcyber00.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tcyber00.pdf},
}
@InProceedings{Dixon1999a,
Title = {Global Exponential Tracking Control of A Mobile Robot System via a PE Condition},
Author = {W. E. Dixon and D. M. Dawson and F. Zhang and E. Zergeroglu},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {1999},
Address = {Phoenix, Arizona},
Month = {Dec.},
Pages = {4822-4827},
Keywords = {Robotpub},
Timestamp = {2017.05.09}
}
@InProceedings{Dixon1999e,
Title = {Global Exponential Setpoint Control of Mobile Robots,Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics,},
Author = {W. E. Dixon and D. M. Dawson and F. Zhang and E. Zergeroglu},
Booktitle = {Proc. IEEE/ASME Int. Conf. Adv. Intell. Mechatron.},
Year = {1999},
Address = {Atlanta, Georgia},
Month = {Sep.},
Pages = {683-688},
Keywords = {Robotpub, WMR},
Timestamp = {2017.05.09}
}
@InProceedings{Dixon2003e,
Title = {Adaptive Range Identification for Exponential Visual Servo Control},
Author = {W. E. Dixon and Y. Fang and D. M. Dawson and J. Chen},
Booktitle = {Proc. IEEE Int. Symp. Intell. Control},
Year = {2003},
Address = {Houston, Texas},
Month = {Oct.},
Pages = {46-51},
Keywords = {vision control}
}
@Article{Dixon2003a,
Title = {Range Identification for Perspective Vision Systems},
Author = {W. E. Dixon and Y. Fang and D. M. Dawson and T. J. Flynn},
Journal = {IEEE Trans. Autom. Control},
Year = {2003},
Pages = {2232-2238},
Volume = {48},
Keywords = {vision estimation},
Url1 = {http://ncr.mae.ufl.edu/papers/tac03_2.pdf}
}
@InProceedings{Dixon2003f,
Title = {Range Identification for Perspective Vision Systems},
Author = {W. E. Dixon and Y. Fang and D. M. Dawson and T. J. Flynn},
Booktitle = {Proc. Am. Control Conf.},
Year = {2003},
Address = {Denver, Colorado},
Month = {Jun.},
Pages = {3448-3453},
Keywords = {vision estimation}
}
@InProceedings{Dixon2005,
author = {W. E. Dixon and T. Galluzzo and G. Hu and C. Crane},
booktitle = {Fifth Int. Workshop on Robot Motion and Control},
title = {Adaptive Velocity Field Control of a Wheeled Mobile Robot},
year = {2005},
address = {Dymaczewo, Poland},
month = {Jun.},
pages = {145-150},
keywords = {robotpub, WMR, Guoqiang},
timestamp = {2016.06.02},
}
@Article{Dixon2000c,
author = {W. E. Dixon and Z. P. Jiang and D. M. Dawson},
journal = {Automatica},
title = {Global Exponential Setpoint Control of Wheeled Mobile Robots: A Lyapunov Approach},
year = {2000},
pages = {1741-1746},
volume = {36},
keywords = {robotpub, WMR},
url = {http://ncr.mae.ufl.edu/papers/auto00.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/auto00.pdf},
}
@InProceedings{Dixon2002b,
author = {W. E. Dixon and L. J. Love},
booktitle = {Proc. ANS Int. Spectr. Conf.},
title = {Lyapunov-based Visual Servo Control for Robotic Deactivation and Decommissioning},
year = {2002},
address = {Reno, Nevada},
month = {Aug.},
keywords = {robotpub, vision control},
}
@InProceedings{Dixon2001b,
Title = {A Simulink-Based Robotic Toolkit for Simulation and Control of the PUMA 560 Robot Manipulator},
Author = {W. E. Dixon and D. Moses and I. D. Walker and D. M. Dawson},
Booktitle = {Proc. IEEE/RSJ Int. Conf. Intell. Robot. Syst.},
Year = {2001},
Address = {Maui, HI},
Month = {Nov.},
Pages = {2202-2207},
Keywords = {robotpub, Simulink}
}
@InProceedings{Dixon2002c,
author = {W. E. Dixon and M. S. de Queiroz and D. M. Dawson},
booktitle = {Proc. IEEE Int. Conf. Robot. Autom.},
title = {Adaptive Tracking and Regulation Control of a Wheeled Mobile Robot with Controller/Update Law Modularity},
year = {2002},
address = {Washington, DC},
month = {May},
pages = {2620-2625},
keywords = {robotpub, theory, WMR},
}
@Article{Dixon2004a,
author = {W. E. Dixon and M. S. de Queiroz and D. M. Dawson and T. J. Flynn},
journal = {IEEE Trans. Control Syst. Technol.},
title = {Adaptive Tracking and Regulation Control of a Wheeled Mobile Robot with Controller/Update Law Modularity},
year = {2004},
pages = {138-147},
volume = {12},
keywords = {robotpub, theory, WMR},
url = {http://ncr.mae.ufl.edu/papers/cst04.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/cst04.pdf},
}
@Article{Dixon1999,
Title = {Tracking Control of Robot Manipulators with Bounded Torque Inputs},
Author = {W. E. Dixon and M. S. de Queiroz and D. M. Dawson and F. Zhang},
Journal = {Robotica},
Year = {1999},
Pages = {121-129},
Volume = {17},
Keywords = {Robotpub},
Timestamp = {2017.05.09},
Url1 = {http://ncr.mae.ufl.edu/papers/robo99_2.pdf}
}
@InProceedings{Dixon1998a,
Title = {Tracking Control of Robot Manipulators with Bounded Torque Inputs},
Author = {W. E. Dixon and M. S. de Queiroz and D. M. Dawson and and F. Zhang},
Booktitle = {Proc. IASTED Int. Conf. Robot. Manuf.},
Year = {1998},
Address = {Banff, Canada},
Month = {Jul.},
Pages = {112-115},
Keywords = {Robotpub},
Timestamp = {2017.05.09}
}
@InProceedings{Dixon2001d,
author = {W. E. Dixon and I. D. Walker and D. M. Dawson},
booktitle = {Proc. IEEE/ASME Int. Conf. Adv. Intell. Mechatron.},
title = {Fault Detection for Wheeled Mobile Robots with Parametric Uncertainty},
year = {2001},
address = {Como, Italy},
month = {Jul.},
pages = {1245-1250},
keywords = {robotpub, WMR, fault},
}
@Article{Dixon2000a,
author = {W. E. Dixon and I. D. Walker and D. M. Dawson and J. P. Hartranft},
journal = {IEEE Trans. Robot. Autom.},
title = {Fault Detection for Robot Manipulators with Parametric Uncertainty: A Prediction Error Based Approach},
year = {2000},
pages = {689-699},
volume = {16},
keywords = {Robotpub, fault},
timestamp = {2017.05.09},
url = {http://ncr.mae.ufl.edu/papers/tra00.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tra00.pdf},
}
@InProceedings{Dixon2000j,
author = {W. E. Dixon and I. D. Walker and D. M. Dawson and J. P. Hartranft},
booktitle = {Proc. IEEE Int. Conf. Robot. Autom.},
title = {Fault Detection for Robotic Manipulators with Parametric Uncertainty: A Prediction Error Based Approach},
year = {2000},
address = {San Francisco, California},
month = {Apr.},
pages = {3628-3634},
keywords = {robotpub, fault},
}
@Article{Dixon2001,
Title = {Comments on Adaptive Variable Structure Setpoint Control of Underactuated Robots},
Author = {W. E. Dixon and E. Zergeroglu},
Journal = {IEEE Trans. Autom. Control},
Year = {2001},
Pages = {812},
Volume = {46},
Keywords = {Robotpub},
Url = {http://ncr.mae.ufl.edu/papers/tac01.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/tac01.pdf}
}
@Article{Dixon2000d,
author = {W. E. Dixon and E. Zergeroglu},
journal = {IEEE Trans. Autom. Control},
title = {Comments on Sliding-Mode Motion/Force Control of Constrained Robots},
year = {2000},
pages = {1576-1577},
volume = {45},
keywords = {robotpub, theory},
url = {http://ncr.mae.ufl.edu/papers/tac00.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tac00.pdf},
}
@InProceedings{Dixon2001c,
author = {W. E. Dixon and E. Zergeroglu and D. Dawson and B. T. Costic},
booktitle = {Proc. IEEE Conf. Control Appl.},
title = {Repetitive Learning Control: A Lyapunov-Based Approach},
year = {2001},
address = {Mexico City, Mexico},
month = {Sep.},
pages = {530-535},
keywords = {robotpub, theory, learning, repetitive learning},
}
@Article{Dixon2004,
Title = {Global Robust Output Feedback Tracking Control of Robot Manipulators},
Author = {W. E. Dixon and E. Zergeroglu and D. M. Dawson},
Journal = {Robotica},
Year = {2004},
Pages = {351-357},
Volume = {22},
Keywords = {Robotpub},
Url = {http://ncr.mae.ufl.edu/papers/robo04.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/robo04.pdf}
}
@Article{Dixon2002,
author = {W. E. Dixon and E. Zergeroglu and D. M. Dawson and B. T. Costic},
journal = {IEEE Trans. Syst. Man Cybern. Part B Cybern.},
title = {Repetitive Learning Control: A Lyapunov-Based Approach},
year = {2002},
pages = {538-545},
volume = {32},
keywords = {robotpub, theory, learning, repetitive learning},
url1 = {http://ncr.mae.ufl.edu/papers/tcyber02.pdf},
}
@Article{Dixon2000e,
Title = {Global Adaptive Partial State Feedback Tracking Control of Rigid-Link Flexible-Joint Robots},
Author = {W. E. Dixon and E. Zergeroglu and D. M. Dawson and M. W. Hannan},
Journal = {Robotica},
Year = {2000},
Pages = {325-326},
Volume = {18},
Keywords = {Robotpub},
Url = {http://ncr.mae.ufl.edu/papers/robo00-2.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/robo00_2.pdf}
}
@InProceedings{Dixon1999c,
Title = {Global Adaptive Partial State Feedback Tracking Control of Rigid-Link Flexible-Joint Robots},
Author = {W. E. Dixon and E. Zergeroglu and D. M. Dawson and M. W. Hannan},
Booktitle = {Proc. IEEE/ASME Int. Conf. Adv. Intell. Mechatron.},
Year = {1999},
Address = {Atlanta, Georgia},
Month = {Sep.},
Pages = {281-286},
Keywords = {Robotpub},
Timestamp = {2017.05.09}
}
@InProceedings{Dixon1999d,
Title = {Experimental Video of a Controller for Flexible Joint Robots},
Author = {W. E. Dixon and E. Zergeroglu and D. M. Dawson and M. W. Hannan},
Booktitle = {Proc. IEEE/ASME Int. Conf. Adv. Intell. Mechatron.},
Year = {1999},
Address = {Atlanta, Georgia},
Month = {Sep.},
Keywords = {Robotpub},
Timestamp = {2017.05.09}
}
@InProceedings{Dixon1998b,
Title = {Global Output Feedback Tracking Control for Rigid-Link Flexible-Joint Robots},
Author = {W. E. Dixon and E. Zergeroglu and D. M. Dawson and M. S. de Queiroz},
Booktitle = {Proc. IEEE Int. Conf. Robot. Autom.},
Year = {1998},
Address = {Leuven, Belgium},
Month = {May},
Pages = {498-504},
Keywords = {Robotpub},
Timestamp = {2017.05.09}
}
@InProceedings{Dixon2002d,
author = {W. E. Dixon and E. Zergeroglu and Y. Fang and D. M. Dawson},
booktitle = {Proc. IEEE Int. Conf. Robot. Autom.},
title = {Object Tracking by a Robot Manipulator: A Robust Cooperative Visual Servoing Approach},
year = {2002},
address = {Washington, DC},
month = {May},
pages = {211-216},
keywords = {robotpub, vision control},
}
@InProceedings{Dixon1998,
Title = {Global Robust Output Feedback Tracking Control of Robot Manipulators},
Author = {W. E. Dixon and F. Zhang and D. M. Dawson and A. Behal},
Booktitle = {Proc. IEEE Conf. Control Appl.},
Year = {1998},
Address = {Trieste, Italy},
Month = {Sep.},
Pages = {897-901},
Keywords = {Robotpub},
Timestamp = {2017.05.09}
}
@PhdThesis{Downey2015,
Title = {Asynchronous Neuromuscular Electrical Stimulation},
Author = {R. Downey},
School = {University of Florida},
Year = {2015},
Keywords = {NMES, RISE, switched},
Owner = {wdixon},
Timestamp = {2012.08.27},
Url1 = {http://ncr.mae.ufl.edu/dissertations/sank.pdf}
}
@InBook{Downey.Kamalapurkar.ea2015,
author = {R. Downey and R. Kamalapurkar and N. Fischer and W. E. Dixon},
chapter = {Compensating for Fatigue-Induced Time-Varying Delayed Muscle Response in Neuromuscular Electrical Stimulation Control},
editor = {I. Karafyllis and M. Malisoff and F. Mazenc and P. Pepe},
pages = {143-161},
publisher = {Springer New York},
title = {Recent Results on Nonlinear Delay Control Systems: {I}n honor of {M}iroslav {K}rstic},
year = {2015},
keywords = {delay, NMES},
owner = {wdixon},
}
@Article{Downey.Merad.ea2017,
Title = {The Time-Varying Nature of Electromechanical Delay and Muscle Control Effectiveness in Response to Stimulation-Induced Fatigue},
Author = {R. Downey and M. Merad and E. Gonzalez and W. E. Dixon},
Journal = {IEEE Trans. Neural Syst. Rehabil. Eng.},
Year = {2017},
Month = {September},
Number = {9},
Pages = {1397-1408},
Volume = {25},
Keywords = {switched, NMES, FES, delay},
Owner = {wdixon},
Timestamp = {2017.09.13},
Url1 = {http://ncr.mae.ufl.edu/papers/TNSRE17.pdf}
}
@InProceedings{Downey.Ambrosini.ea2012,
author = {R. J. Downey and E. Ambrosini and S. Ferrante and A. Pedrocchi and W. E. Dixon and G. Ferrigno},
booktitle = {Proc. Int. Func. Elect. Stimul. Soc.},
title = {Asynchronous Stimulation with an Electrode Array Reduces Muscle Fatigue During {FES} Cycling},
year = {2012},
address = {Banff, Canada},
month = {Sep.},
pages = {154-157},
keywords = {NMES, cycle},
owner = {wdixon},
timestamp = {2013.01.02},
}
@Article{Downey2011,
Title = {A Novel Modulation Strategy to Increase Stimulation Duration in Neuromuscular Electrical Stimulation},
Author = {R. J. Downey and M. Bellman and N. Sharma and Q. Wang and C. M. Gregory and W. E. Dixon},
Journal = {Muscle Nerve},
Year = {2011},
Month = {Sep.},
Number = {3},
Pages = {382-387},
Volume = {44},
Keywords = {NMES, RISE},
Url1 = {http://ncr.mae.ufl.edu/papers/MN11.pdf}
}
@Article{Downey.Bellman.ea2015,
Title = {Comparing the Induced Muscle Fatigue Between Asynchronous and Synchronous Electrical Stimulation in Able-Bodied and Spinal Cord Injured Populations},
Author = {R. J. Downey and M. J. Bellman and H. Kawai and C. M. Gregory and W. E. Dixon},
Journal = {IEEE Trans. Neural Syst. Rehabil. Eng.},
Year = {2015},
Number = {6},
Pages = {964--972},
Volume = {23},
Doi = {10.1109/TNSRE.2014.2364735},
Keywords = {NMES},
Owner = {Ryan},
Timestamp = {2016.02.29},
Url1 = {http://ncr.mae.ufl.edu/papers/TNSRE15.pdf}
}
@InProceedings{Downey.Cheng.ea2015,
Title = {Switched Tracking Control of a Human Limb during Asynchronous Neuromuscular Electrical Stimulation},
Author = {Ryan J. Downey and Teng-Hu Cheng and Matthew Bellman and Warren E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2015},
Pages = {4504-4508},
Keywords = {NMES, switched},
Owner = {wdixon},
Timestamp = {2015.02.09}
}
@Article{Downey.Cheng.ea2017,
Title = {Switched Tracking Control of the Lower Limb during Asynchronous Neuromuscular Electrical Stimulation: Theory and Experiments},
Author = {R. J. Downey and T.-H. Cheng and M. J. Bellman and W. E. Dixon},
Journal = {IEEE Trans. Cybern.},
Year = {2017},
Month = {May},
Number = {5},
Pages = {1251-1262},
Volume = {47},
Keywords = {NMES, switched},
Owner = {wdixon},
Timestamp = {2017.05.12},
Url1 = {http://ncr.mae.ufl.edu/papers/cyber17.pdf}
}
@Article{Downey.Cheng.ea2015a,
Title = {Closed-loop Asynchronous Electrical Stimulation Prolongs Functional Movements in the Lower Body},
Author = {R. J. Downey and Teng-Hu Cheng and M. J. Bellman and W. E. Dixon},
Journal = {IEEE Trans. Neural Syst. Rehabil. Eng.},
Year = {2015},
Number = {6},
Pages = {1117--1127},
Volume = {23},
Doi = {10.1109/TNSRE.2015.2427658},
Keywords = {NMES},
Owner = {Ryan},
Timestamp = {2016.02.29},
Url1 = {http://ncr.mae.ufl.edu/papers/TNSRE15_2.pdf}
}
@InProceedings{Downey.Cheng.ea2013,
author = {R. J. Downey and T.-H. Cheng and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Tracking Control of a Human Limb during Asynchronous Neuromuscular Electrical Stimulation},
year = {2013},
address = {Florence, IT},
month = {Dec.},
pages = {139-144},
doi = {10.1109/CDC.2013.6759872},
keywords = {NMES, cycle},
owner = {wdixon},
timestamp = {2013.07.19},
}
@Article{Downey.Tate.ea2014,
Title = {Comparing the force ripple during asynchronous and conventional stimulation},
Author = {R. J. Downey and M. Tate and H. Kawai and W. E. Dixon},
Journal = {Muscle Nerve},
Year = {2014},
Month = {Oct.},
Number = {4},
Pages = {549--555},
Volume = {50},
Doi = {10.1002/mus.24186},
Keywords = {NMES},
Owner = {wdixon},
Timestamp = {2014.01.17},
Url1 = {http://ncr.mae.ufl.edu/papers/MN14.pdf}
}
@PhdThesis{Duenas2018,
author = {V. Duenas},
school = {University of Florida},
title = {Functional Electrical Stimulation Induced Cycling Using Repetitive Learning And Passivity-Based Control},
year = {2018},
keywords = {FES, NMES},
owner = {wdixon},
timestamp = {2018.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/Victor2018.pdf},
}
@Article{Duenas.Cousin.ea2020,
author = {V. Duenas and C. A. Cousin and V. Ghanbari and E. J. Fox and W. E. Dixon},
journal = {Automatica},
title = {Torque and Cadence Tracking in Functional Electrical Stimulation Induced Cycling using Passivity-Based Spatial Repetitive Learning Control},
year = {2020},
pages = {1-9},
volume = {115},
keywords = {FES, NMES},
url1 = {http://ncr.mae.ufl.edu/papers/auto20.pdf},
}
@InProceedings{Duenas.Cousin.ea2018a,
Title = {Extremum Seeking Control for Power Tracking via Functional Electrical Stimulation},
Author = {V. Duenas and C. A. Cousin and C. Rouse and W. E. Dixon},
Booktitle = {Proc. IFAC Conf. Cyber. Phys. Hum. Syst.},
Year = {2018},
Pages = {164-169},
Keywords = {FES, NMES, extremum seeking}
}
@InProceedings{Duenas.Cousin.ea2016,
Title = {Influence of Vibration Stimuli on Neuromuscular Electrical Stimulation of the Quadriceps Femoris Muscle Group},
Author = {V. Duenas and C. Cousin and R. Downey and D. Bolser and W. E. Dixon},
Booktitle = {Proc. Int. Funct. Electr. Stim. Soc.},
Year = {2016},
Keywords = {NMES},
Owner = {wdixon},
Timestamp = {2016.04.15}
}
@InProceedings{Duenas.Cousin.ea2016a,
Title = {Functional Electrical Stimulation Induced Cycling using Repetitive Learning Control},
Author = {V. Duenas and C. Cousin and A. Parikh and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2016},
Keywords = {NMES},
Owner = {wdixon},
Timestamp = {2016.07.25}
}
@Article{Duenas.Cousin.ea2019,
author = {V. H. Duenas and C. A. Cousin and A. Parikh and P. Freeborn and E. J. Fox and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Tech.},
title = {Motorized and Functional Electrical Stimulation Induced Cycling via Switched Repetitive Learning Control},
year = {2019},
number = {4},
pages = {1468-1479},
volume = {27},
keywords = {FES, NMES},
owner = {wdixon},
timestamp = {2018.03.15},
url1 = {http://ncr.mae.ufl.edu/papers/cst19_2.pdf},
}
@Article{Duenas.Cousin.ea2020b,
author = {V. H. Duenas and C. A. Cousin and C. Rouse and E. J. Fox and W. E. Dixon},
journal = {IEEE Trans. Cybern.},
title = {Distributed Repetitive Learning Control for Cooperative Cadence Tracking in Functional Electrical Stimulation Cycling},
year = {2020},
number = {3},
pages = {1084-1095},
volume = {50},
keywords = {FES, NMES, learning, RLC},
url1 = {http://ncr.mae.ufl.edu/papers/tcyber20.pdf},
}
@InProceedings{Duenas.Cousin.ea2018,
Title = {Passivity-Based Learning Control for Torque and Cadence Tracking in Functional Electrical Stimulation {FES} Induced Cycling},
Author = {V. H. Duenas and C. Cousin and V. Ghanbari and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2018},
Pages = {3726-3731},
Keywords = {robotpub, NMES},
Owner = {wdixon},
Timestamp = {2018.01.22}
}
@PhdThesis{Dupree2009e,
author = {K. Dupree},
school = {University of Florida},
title = {Optimal Control of Uncertain {E}uler-{L}agrange Systems},
year = {2009},
keywords = {RISE, Optimal, NN, theory},
timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/dupree_k.pdf},
}
@InProceedings{Dupree2006a,
author = {K. Dupree and W. E. Dixon and G. Hu and C.-H. Liang},
booktitle = {Proc. Am. Control Conf.},
title = {Lyapunov-Based Control of a Robot and Mass-Spring System Undergoing An Impact Collision},
year = {2006},
address = {Minneapolis, Minnesota},
month = {Jun.},
pages = {3241-3246},
keywords = {robotpub, Impact, Guoqiang},
timestamp = {2016.06.02},
}
@InProceedings{Dupree2007,
Title = {Euclidean Calculation of Feature Points of a Rotating Satellite: A Daisy Chaining Approach},
Author = {K. Dupree and N. Gans and W. Mackunis and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2007},
Address = {York, NY},
Month = {Jul.},
Pages = {3874-3879},
Keywords = {satellite, vision estimation, aeropub}
}
@Article{Dupree2008a,
author = {K. Dupree and N. R. Gans and W. MacKunis and and W. E. Dixon},
journal = {AIAA J. Guid. Control Dyn.},
title = {Euclidean Calculation of Feature Points of a Rotating Satellite: A Daisy Chaining Approach},
year = {2008},
pages = {954-961},
volume = {31},
keywords = {satellite, vision estimation, aeropub},
}
@InProceedings{Dupree2009c,
author = {K. Dupree and M. Johnson and P. M. Patre and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Inverse Optimal Control of a Nonlinear {E}uler-{L}agrange System, Part II: Output Feedback},
year = {2009},
address = {Shanghai, China},
month = {Jan.},
pages = {327-332},
keywords = {Optimal, theory},
}
@Article{Dupree2009,
author = {K. Dupree and C. Liang and G. Hu and W. E. Dixon},
journal = {Int. J. Robot. Autom.},
title = {Lyapunov-Based Control of a Robot and Mass-Spring System Undergoing An Impact Collision},
year = {2009},
number = {4},
pages = {3166-3174},
volume = {206},
keywords = {robotpub, Impact, Guoqiang},
timestamp = {2016.06.02},
}
@Article{Dupree2008,
author = {K. Dupree and C. Liang and G. Hu and W. E. Dixon},
journal = {IEEE Trans. Syst. Man Cybern.},
title = {Global Adaptive Lyapunov-Based Control of a Robot and Mass-Spring System Undergoing An Impact Collision},
year = {2008},
pages = {1050-1061},
volume = {38},
keywords = {robotpub, Impact, Guoqiang},
timestamp = {2016.06.02},
url = {http://ncr.mae.ufl.edu/papers/tcyber08.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tcyber08.pdf},
}
@InProceedings{Dupree2006,
author = {K. Dupree and C.-H. Liang and G. Hu and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Global Adaptive Lyapunov-Based Control of a Robot and Mass-Spring System Undergoing An Impact Collision},
year = {2006},
address = {San Diego, California},
month = {Dec.},
pages = {2039-2044},
keywords = {robotpub, Impact, Guoqiang},
timestamp = {2016.06.02},
}
@InProceedings{Dupree2008c,
author = {K. Dupree and S. Mehta and C. Crane and W. E. Dixon},
booktitle = {Int. Jt. Top. Meet. Emerg. Prep. Response Robot. Remote Syst.},
title = {Euclidean Calculation of the Pose of an Unmanned Ground Vehicle: A Daisy Chaining Approach},
year = {2008},
address = {Albuquerque, New Mexico},
month = {Mar.},
pages = {557-562},
keywords = {robotpub, vision},
}
@Article{Dupree2011,
author = {K. Dupree and P. Patre and Z. Wilcox and W. E. Dixon},
journal = {Automatica},
title = {Asymptotic Optimal Control of Uncertain Nonlinear Systems},
year = {2011},
number = {1},
pages = {99-107},
volume = {47},
keywords = {RISE, Optimal, NN, theory},
url = {http://ncr.mae.ufl.edu/papers/auto11.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/auto11.pdf},
}
@InProceedings{Dupree2008b,
author = {K. Dupree and P. Patre and Z. Wilcox and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Optimal Control of Uncertain Nonlinear Systems using {RISE} Feedback},
year = {2008},
address = {Cancun, Mexico},
month = {Dec.},
pages = {2154 - 2159},
keywords = {RISE, Optimal, NN, theory},
}
@InProceedings{Dupree2009b,
author = {K. Dupree and P. M. Patre and M. Johnson and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Inverse Optimal Adaptive Control of a Nonlinear {E}uler-{L}agrange System: Part I},
year = {2009},
address = {Shanghai, China},
month = {Jan.},
pages = {321-326},
keywords = {Optimal, theory},
}
@InProceedings{Dupree2009d,
author = {K. Dupree and P. M. Patre and Z. D. Wilcox and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Optimal Control of Uncertain Nonlinear Systems using a Neural Network and {RISE} Feedback},
year = {2009},
address = {St. Louis, Missouri},
month = {Jun.},
pages = {361-366},
keywords = {RISE, Optimal, NN, theory},
}
@InProceedings{Estay.Rouse.ea2019,
Title = {Cadence and Position Tracking for Decoupled Legs during Switched Split-Crank Motorized {FES}-Cycling},
Author = {F. I. Esquivel Estay and C. Rouse and M. Cohen and C. Cousin and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2019},
Pages = {854-859},
Keywords = {NMES, FES}
}
@InProceedings{Fang2003c,
Title = {Adaptive 2.5D Visual Servoing of Kinematically Redundant Robot Manipulators},
Author = {Y. Fang and A. Behal and W. E. Dixon and D. M. Dawson},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2003},
Address = {Las Vegas, Nevada},
Month = {Dec.},
Pages = {2860-2865},
Keywords = {robotpub, vision control}
}
@InProceedings{Fang2002,
author = {Y. Fang and D. M. Dawson and W. E. Dixon and M. S. de Queiroz},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Homography-based Visual Servoing of Wheeled Mobile Robots},
year = {2002},
address = {Las Vegas, Nevada},
month = {Dec.},
pages = {2866-2871},
keywords = {robotpub, WMR, vision control},
}
@InProceedings{Fang2004,
author = {Y. Fang and W. E. Dixon and D. M. Dawson},
booktitle = {Proc. Conf. Control Autom. Robot. Vision.},
title = {Adaptive 2.5D Visual Servoing of Cartesian Robots},
year = {2004},
address = {Kunming, China},
month = {Dec.},
pages = {68-73},
keywords = {robotpub, vision control},
}
@Article{Fang2005,
author = {Y. Fang and W. E. Dixon and D. M. Dawson and P. Chawda},
journal = {IEEE Trans. Syst. Man Cybern. Part B Cybern.},
title = {Homography-Based Visual Servo Regulation of Mobile Robots},
year = {2005},
pages = {1041-1050},
volume = {35},
keywords = {robotpub, vision control, WMR},
url = {http://ncr.mae.ufl.edu/papers/tcyber05.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tcyber05.pdf},
}
@Article{Fang2006,
author = {Y. Fang and W. E. Dixon and D. M. Dawson and J. Chen},
journal = {Int. J. Robot. Autom.},
title = {An Exponential Class of Model-Free Visual Servoing Controllers in the Presence of Uncertain Camera Calibration},
year = {2006},
pages = {5390-5395},
volume = {21},
keywords = {robotpub, vision control},
}
@InProceedings{Fang2003a,
Title = {An Exponential Class of Model-Free Visual Servoing Controllers in the Presence of Uncertain Camera Calibration},
Author = {Y. Fang and W. E. Dixon and D. M. Dawson and J. Chen},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2003},
Address = {Maui, Hawaii USA},
Month = {Dec.},
Pages = {5390-5395},
Keywords = {vision control}
}
@InProceedings{Fang2003b,
author = {Y. Fang and W. E. Dixon and D. M. Dawson and J. Chen},
booktitle = {Proc. Am. Control Conf.},
title = {Robust 2.5D Visual Servoing for Robot Manipulators},
year = {2003},
address = {Denver, Colorado},
month = {Jun.},
pages = {3311-3316},
keywords = {robotpub, vision control},
}
@Article{Fang2003,
author = {Y. Fang and W. E. Dixon and D. M. Dawson and E. Zergeroglu},
journal = {IEEE Trans. Mechatron.},
title = {Nonlinear Coupling Control Laws for a 3-DOF Overhead Crane System},
year = {2003},
pages = {418-423},
volume = {8},
keywords = {robotpub, crane},
url = {http://ncr.mae.ufl.edu/papers/tm03.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tm03.pdf},
}
@InProceedings{Fang2001,
Title = {Nonlinear Coupling Control Laws for a 3-DOF Overhead Crane System},
Author = {Y. Fang and W. E. Dixon and D. M. Dawson and E. Zergeroglu},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2001},
Month = {Dec.},
Pages = {3766-3771},
Keywords = {robotpub, crane}
}
@InProceedings{Fang2001a,
author = {Y. Fang and E. Zergeroglu and W. E. Dixon and D. M. Dawson},
booktitle = {Proc. IEEE Conf. Control Appl.},
title = {Nonlinear Coupling Control Laws for an Overhead Crane System},
year = {2001},
address = {Mexico City, Mexico},
month = {Sep.},
pages = {639-644},
keywords = {robotpub, crane},
}
@Article{Feemster1999,
Title = {Tracking Control in the Presence of Nonlinear Dynamic Frictional Effects: Robot Extension},
Author = {M. Feemster and D. M. Dawson and A. Behal and W. E. Dixon},
Journal = {Asian J. Control},
Year = {1999},
Pages = {153-168},
Volume = {1},
Keywords = {Robotpub},
Url = {http://ncr.mae.ufl.edu/papers/ajc99.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/ajc99.pdf}
}
@InProceedings{Feemster1999a,
Title = {Tracking Control in the Presence of Nonlinear Dynamic Frictional Effects: Robot Extension},
Author = {M. Feemster and D. M. Dawson and A. Behal and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Control Appl.},
Year = {1999},
Address = {Kohala Coast, Hawaii},
Pages = {1169-1174},
Keywords = {Robotpub}
}
@InProceedings{Feng.Dixon.ea2017,
Title = {Fast Algorithms for Jammer Placement to Partition a Wireless Network},
Author = {J. Feng and W. E. Dixon and J. M. Shea},
Booktitle = {IEEE Int. Conf. Comm.},
Year = {2017},
Keywords = {networkpub},
Owner = {wdixon},
Timestamp = {2017.04.14}
}
@InProceedings{Feng.Dixon.ea2017a,
Title = {Positioning Helper Nodes to Improve Robustness of Wireless Mesh Networks to Jamming Attacks},
Author = {J. Feng and W. E Dixon and J. M Shea},
Booktitle = {IEEE Glob. Commun. Conf.},
Year = {2017},
Keywords = {networkpub},
Owner = {wdixon},
Timestamp = {2018.04.19}
}
@InProceedings{Feng.Dixon.ea2019,
Title = {Optimal Jammer Placement in the Real Plane to Partition a Wireless Network},
Author = {J. Feng and W. E. Dixon and T. Wong and J. Shea},
Booktitle = {IEEE Wirel. Commun. and Netw. Conf.},
Year = {2019},
Keywords = {networkpub}
}
@InProceedings{Feng.Pasiliao.ea2015,
author = {J. Feng and E. L. Pasiliao and W. E. Dixon and J. M. Shea},
booktitle = {Proc. IEEE Mil. Commun. Conf.},
title = {An Optimal Jamming Strategy to Partition a Wireless Network},
year = {2015},
address = {Tampa, FL},
pages = {978-984},
keywords = {Networkpub, Optimal},
owner = {wdixon},
}
@Article{Feng.Hu.ea2018,
Title = {Distributed Coordination of Multiple Unknown Euler-Lagrange Systems},
Author = {Z. Feng and G. Hu and W. Ren and W. E. Dixon and J. Mei},
Journal = {IEEE Trans. Control Netw. Syst.},
Year = {2018},
Number = {1},
Pages = {55-66},
Volume = {5},
Keywords = {networkpub, Guoqiang},
Owner = {wdixon},
Timestamp = {2018.03.18},
Url1 = {http://ncr.mae.ufl.edu/papers/TCNS18c.pdf}
}
@PhdThesis{Fischer2012,
author = {N. Fischer},
school = {University of Florida},
title = {Lyapunov-Based Control of Saturated and Time-Delayed Nonlinear Systems},
year = {2012},
keywords = {RISE, Saturated, delay, NN, theory},
owner = {wdixon},
timestamp = {2012.08.27},
url1 = {http://ncr.mae.ufl.edu/dissertations/nic.pdf},
}
@InProceedings{Fischer2011,
author = {N. Fischer and S. Bhasin and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Nonlinear Control of an Autonomous Underwater Vehicle: A {RISE}-Based Approach},
year = {2011},
address = {San Francisco, CA},
pages = {3972-3977},
keywords = {RISE, robotpub, aeropub, NN, AUV, theory},
}
@Article{Fischer.Dani.ea2013,
author = {N. Fischer and A. Dani and N. Sharma and W. E. Dixon},
journal = {Automatica},
title = {Saturated Control of an Uncertain Nonlinear System with Input Delay},
year = {2013},
number = {6},
pages = {1741-1747},
volume = {49},
keywords = {Saturated, delay, theory},
owner = {wdixon},
timestamp = {2012.11.12},
url1 = {http://ncr.mae.ufl.edu/papers/auto13_2.pdf},
}
@InProceedings{Fischer2011a,
author = {N. Fischer and A. Dani and N. Sharma and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Saturated Control of an Uncertain {E}uler-{L}agrange System with Input Delay},
year = {2011},
address = {Orlando, FL},
pages = {7587-7592},
keywords = {Saturated, delay, theory},
}
@Article{Fischer.Hughes.ea2014,
author = {N. Fischer and D. Hughes and P. Walters and E. Schwartz and W. E. Dixon},
journal = {IEEE Trans. Robot.},
title = {Nonlinear {RISE}-based Control of an Autonomous Underwater Vehicle},
year = {2014},
month = {Aug.},
number = {4},
pages = {845-852},
volume = {30},
keywords = {RISE, theory, robotpub, aeropub, NN, AUV},
owner = {wdixon},
timestamp = {2013.08.16},
url1 = {http://ncr.mae.ufl.edu/papers/tro14.pdf},
}
@Article{Fischer.Kamalapurkar.ea2013,
Title = {La{S}alle-{Y}oshizawa Corollaries for Nonsmooth Systems},
Author = {N. Fischer and R. Kamalapurkar and W. E. Dixon},
Journal = {IEEE Trans. Autom. Control},
Year = {2013},
Month = {Sep.},
Number = {9},
Pages = {2333-2338},
Volume = {58},
Keywords = {theory},
Owner = {wdixon},
Url1 = {http://ncr.mae.ufl.edu/papers/fly.pdf}
}
@InProceedings{Fischer.Kamalapurkar.ea2012a,
author = {N. Fischer and R. Kamalapurkar and N. Fitz-Coy and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Lyapunov-Based Control of an Uncertain {E}uler-{L}agrange System with Time-Varying Input Delay},
year = {2012},
address = {Montr\'{e}al, Canada},
month = {Jun.},
pages = {3919-3924},
keywords = {delay, theory},
}
@InProceedings{Fischer.Kamalapurkar.ea2012b,
author = {N. Fischer and R. Kamalapurkar and N. Sharma and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {{RISE}-Based Control of an Uncertain Nonlinear System With Time-Varying State Delays},
year = {2012},
address = {Maui, HI},
month = {Dec.},
pages = {3502-3507},
keywords = {RISE, Robo, delay, NN, theory},
owner = {wdixon},
timestamp = {2012.07.19},
}
@InProceedings{Fischer.Kan.ea2012,
author = {N. Fischer and Z. Kan and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Saturated {RISE} Feedback Control for {E}uler-{L}agrange Systems},
year = {2012},
address = {Montr\'{e}al, Canada},
month = {Jun.},
pages = {244-249},
keywords = {RISE, Saturated, theory},
}
@Article{Fischer.Kan.ea2014,
author = {N. Fischer and Z. Kan and R. Kamalapurkar and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Saturated {RISE} Feedback Control for a Class of Second-Order Nonlinear Systems},
year = {2014},
month = {Apr.},
number = {4},
pages = {1094-1099},
volume = {59},
keywords = {RISE, Saturated, theory},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/TAC14.pdf},
}
@InProceedings{Gans2009b,
author = {N. Gans and W. Curtis and P. Barooah and J. Shea and W. E. Dixon},
booktitle = {Proc. AIAA Guid. Navig. Control Conf.},
title = {Balancing Mission Requirement for Networked Autonomous Rotorcrafts Performing Video Reconnaissance},
year = {2009},
address = {Chicago, IL},
month = {Aug.},
keywords = {robotpub, Networkpub, aeropub, UAV},
}
@InBook{Gans2009,
Title = {Encyclopedia of Complexity and Systems Science},
Author = {N. Gans and G. Hu and W. E. Dixon},
Chapter = {Image-Based State Estimation},
Pages = {4751-4776},
Publisher = {Springer},
Year = {2009},
Volume = {5},
ISSN = {9780387758886},
Keywords = {Guoqiang, vision},
Timestamp = {2016.06.02}
}
@Article{Gans2011,
author = {N.R. Gans and G. Hu and K. Nagarajan and W. E. Dixon},
journal = {IEEE Trans. Robot. Autom.},
title = {Keeping Multiple Moving Targets in the Field of View of a Mobile Camera},
year = {2011},
number = {4},
pages = {822-828},
volume = {27},
keywords = {robotpub, vision control, vision estimation, Guoqiang},
timestamp = {2016.06.02},
url = {http://ncr.mae.ufl.edu/papers/TRO11.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/TRO11.pdf},
}
@Article{GansT.A.a,
author = {N.R. Gans and G. Hu and J. Shen and Y. Zhang and W. E. Dixon},
journal = {Mechatron.},
title = {Adaptive Visual Servo Control to Simultaneously Stabilize Image and Pose Error},
year = {2012},
number = {4},
pages = {410-422},
volume = {22},
keywords = {robotpub, vision control, Guoqiang},
timestamp = {2016.06.02},
url1 = {http://ncr.mae.ufl.edu/papers/mech12_2.pdf},
}
@InProceedings{Gans2008c,
author = {N. R. Gans and A. Dani and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Visual Servoing to an Arbitrary Pose with Respect to an Object Given a Single Known Length},
year = {2008},
address = {Seattle, WA, USA},
month = {Jun.},
pages = {1261-1267},
keywords = {robotpub, vision control},
}
@Article{Gans2009a,
author = {N. R. Gans and W. E. Dixon and R. Lind and A. Kurdilla},
journal = {IEEE Trans. Mechatron.},
title = {A Hardware in the Loop Simulation Platform for Vision-Based Control of Unmanned Air Vehicles},
year = {2009},
number = {7},
pages = {1043-1056},
volume = {19},
keywords = {robotpub, Vision Control, Vision Estimation, UAV, aeropub},
url = {http://ncr.mae.ufl.edu/papers/mech09.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/mech09.pdf},
}
@InProceedings{Gans2009c,
Title = {Keeping Multiple Objects in the Field of View of a Single PTZ Camera},
Author = {N. R. Gans and G. Hu and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2009},
Address = {St. Louis, Missouri},
Month = {Jun.},
Pages = {5259-5264},
Keywords = {robotpub, vision control, Guoqiang},
Timestamp = {2016.06.02}
}
@InProceedings{Gans2008a,
author = {N. R. Gans and G. Hu and W. E. Dixon},
booktitle = {Proc. IEEE Int. Symp. Intell. Control},
title = {Simultaneous Stability of Image and Pose Error in Visual Servo Control},
year = {2008},
address = {San Antonio, Texas},
month = {Sep.},
pages = {438-443},
keywords = {robotpub, vision control, Guoqiang},
timestamp = {2016.06.02},
}
@InProceedings{Gans2008b,
author = {N. R. Gans and G. Hu and W. E. Dixon},
booktitle = {Proc. IEEE Int. Symp. Intell. Control},
title = {Keeping Objects in the Field of View: An Underdetermined Task Function Approach to Visual Servoing},
year = {2008},
address = {San Antonio, Texas},
month = {Sep.},
pages = {432-437},
keywords = {robotpub, vision control, Guoqiang},
timestamp = {2016.06.02},
}
@InProceedings{Gans2008,
author = {N. R. Gans and J. Shea and P. Barooah and W. E. Dixon},
booktitle = {Military Communications Conference},
title = {Ensuring Network Connectivity of UAVs Performing Video Reconnaissance},
year = {2008},
address = {San Diego, CA},
month = {Jan.},
keywords = {robotpub, Networkpub, UAV, aeropub},
}
@InProceedings{Gans2010,
author = {N. R. Gans and J. Shen and J. Shea and P. Barooah and W. E. Dixon},
booktitle = {Proc. Soc. Des. Process Sci. Transform. Syst. Conf.},
title = {Balancing Mission Requirement for Networked Autonomous Quadrotor Performing Video Reconnaissance},
year = {2010},
address = {Dallas, TX},
keywords = {robotpub, aeropub, networkpub, UAV},
}
@Article{Ghanbari.Duenas.ea2019,
Title = {Passivity-Based Iterative Learning Control for Cycling Induced by Functional Electrical Stimulation with Electric Motor Assistance},
Author = {V. Ghanbari and V. H. Duenas and P. J. Antsaklis and W. E. Dixon},
Journal = {IEEE Trans. Control Sys. Tech.},
Year = {2019},
Number = {5},
Pages = {2287-2294},
Volume = {27},
Keywords = {FES, NMES},
Url1 = {http://ncr.mae.ufl.edu/papers/cst19_3.pdf}
}
@Article{Gonzalez.Downey.ea2018,
Title = {Influence of Elbow Flexion and Stimulation Site on Neuromuscular Electrical Stimulation of the Biceps Brachii},
Author = {E. J. Gonzalez and R. J. Downey and C. A. Rouse and W. E. Dixon},
Journal = {IEEE Trans. Neural Syst. Rehabil. Eng.},
Year = {2018},
Month = {April},
Number = {4},
Pages = {904-910},
Volume = {26},
Keywords = {switched, NMES, FES},
Owner = {wdixon},
Timestamp = {2018.04.09},
Url1 = {http://ncr.mae.ufl.edu/papers/TNSRE18.pdf}
}
@InProceedings{Greene.RianoRios.ea2020,
Title = {Approximate Optimal Orbit Transfer of Non-cooperative Debris},
Author = {M. Greene and C. Riano-Rios and R. Bevilacqua and N. Fitz-Coy and W. E. Dixon},
Booktitle = {Proc. AIAA SciTech Forum},
Year = {2020},
Keywords = {learning, aeropub, Optimal, NN, RT2}
}
@Article{Greene.Deptula.ea2020,
author = {M. L. Greene and P. Deptula and S. Nivison and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Sparse Learning-Based Approximate Dynamic Programming with Barrier Constraints},
year = {2020},
issn = {2475-1456},
month = jul,
number = {3},
pages = {743-748},
volume = {4},
keywords = {Optimal, NN, Learning, robotpub, theory, RT2},
url1 = {http://ncr.mae.ufl.edu/papers/csl20.pdf},
}
@InProceedings{Greene.Deptula.ea2019,
author = {M. L. Greene and P. Deptula and S. Nivison and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Reinforcement Learning with Sparse {B}ellman Error Extrapolation for Infinite-Horizon Approximate Optimal Regulation},
year = {2019},
address = {Nice, Fr},
month = {Dec.},
pages = {1959-1964},
keywords = {robotpub, optimal, theory},
owner = {wdixon},
}
@Article{Gregory2008,
Title = {Comparing the Force- and Excursion-Frequency Relationships in Human Skeletal Muscle},
Author = {C. M. Gregory and C. S. Bickel and N. Sharma and W. E. Dixon},
Journal = {Muscle Nerve},
Year = {2008},
Number = {6},
Pages = {1627-1629},
Volume = {38},
Keywords = {Impact, NMES},
Url = {http://ncr.mae.ufl.edu/papers/MN08.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/MN08.pdf}
}
@InProceedings{Gregory2008a,
Title = {The Impact of Varying Stimulation Intensity and Contraction Type on the Force-Frequency Relationship in Human Skeletal Muscle During NMES},
Author = {C. M. Gregory and C. S. Bickel and K. Stegath and W. E. Dixon},
Booktitle = {Am. Phys. Ther. Assoc.},
Year = {2008},
Address = {Nashville, TN},
Keywords = {NMES}
}
@Article{Gregory2007,
author = {C. M. Gregory and W. E. Dixon and C. S. Bickel},
journal = {Muscle Nerve},
title = {Impact of Varying Pulse Frequency and Duration on Muscle Torque Production and Fatigue},
year = {2007},
month = {Apr.},
number = {4},
pages = {504-509},
volume = {35},
keywords = {Optimal, Impact, NMES},
url = {http://ncr.mae.ufl.edu/papers/muscle07.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/muscle07.pdf},
}
@InProceedings{Gupta2006,
Title = {Lyapunov-Based Range and Motion Identification for a Nonaffine Perspective Dynamic System},
Author = {S. Gupta and D. Aiken and G. Hu and W .E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2006},
Address = {Minneapolis, Minnesota},
Month = {Jun.},
Pages = {4471-4476},
Keywords = {Vision Control, Vision Estimation, Guoqiang},
Timestamp = {2016.06.02}
}
@InProceedings{Harris.Bell.ea2020,
Title = {Target Tracking in the Presence of Intermittent Measurements by a Sparsely Distributed Network of Stationary Cameras},
Author = {C. Harris and Z. Bell and E. Doucette and J. W. Curtis and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Pages = {3491-3496},
Year = {2020},
Keywords = {robotpub, vision estimation}
}
@InProceedings{Hiramatsu2011,
author = {T. Hiramatsu and M. Johnson and N. Fitz-Coy and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Asymptotic Optimal Tracking Control for an Uncertain Nonlinear {E}uler-{L}agrange System: A {RISE}-based Closed-Loop Stackelberg Game Approach},
year = {2011},
address = {Orlando, FL},
pages = {1030-1035},
keywords = {RISE, Optimal, theory},
}
@PhdThesis{Hu2007e,
Title = {Visual Servo Tracking Control Via A Lyapunov-Based Approach},
Author = {G. Hu},
School = {University of Florida},
Year = {2007},
Keywords = {vision estimation, vision control, robotpub},
Owner = {wdixon},
Timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/gq.pdf},
}
@Article{Hu2008,
Title = {Lyapunov-Based Range Identification For A Paracatadioptric System},
Author = {G. Hu and D. Aiken and S. Gupta and W.E. Dixon},
Journal = {IEEE Trans. Autom. Control},
Year = {2008},
Number = {7},
Pages = {1775-1781},
Volume = {53},
Keywords = {Vision Estimation, Guoqiang},
Timestamp = {2016.06.02}
}
@InProceedings{Hu2007a,
Title = {Lyapunov-Based Adaptive Visual Servo Tracking Control Using Central Catadioptric Camera},
Author = {G. Hu and W. E. Dixon},
Booktitle = {IEEE Multi-Conf. Syst. and Contr.},
Year = {2007},
Address = {Suntec City, Singapore},
Month = {Oct.},
Pages = {1486-1491},
Keywords = {Vision Control, Guoqiang},
Timestamp = {2016.06.02}
}
@Article{Hu.Dixon.ea2012,
Title = {Robust Tracking Control of an Array of Nanoparticles Moving on a Substrate},
Author = {G. Hu and W. E. Dixon and H. Ding},
Journal = {Automatica},
Year = {2012},
Number = {2},
Pages = {442-448},
Volume = {48},
Keywords = {theory, Guoqiang},
Timestamp = {2016.06.02},
Url1 = {http://ncr.mae.ufl.edu/papers/auto12.pdf}
}
@InProceedings{Hu2006a,
author = {G. Hu and W. E. Dixon and S. Gupta and N. Fitz-Coy},
booktitle = {Proc. IEEE Int. Conf. Robot. Autom.},
title = {A Quaternion Formulation for Homography-based Visual Servo Control},
year = {2006},
address = {Orlando, Florida},
month = {May},
pages = {2391-2396},
keywords = {satellite, vision, Guoqiang, aeropub},
timestamp = {2016.06.02},
}
@Article{Hu.Gans.ea2010,
author = {G. Hu and N. Gans and W. E. Dixon},
journal = {Int. J. Robust Nonlinear Control},
title = {Quaternion-Based Visual Servo Control in the Presence of Camera Calibration Error},
year = {2010},
number = {5},
pages = {489-503},
volume = {20},
keywords = {robotpub, satellite, aeropub, Vision Estimation, Guoqiang},
timestamp = {2016.06.02},
url = {http://ncr.mae.ufl.edu/papers/RNC10.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/RNC10.pdf},
}
@InBook{Hu2009,
Title = {Encyclopedia of Complexity and Systems Science},
Author = {G. Hu and N. Gans and W. E. Dixon},
Chapter = {Adaptive Visual Servo Control},
Pages = {42-63},
Publisher = {Springer},
Year = {2009},
Volume = {1},
ISSN = {9780387758886},
Keywords = {Guoqiang, vision},
Timestamp = {2016.06.02}
}
@Article{Hu2010a,
author = {G. Hu and N. Gans and N. Fitz-Coy and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Technol.},
title = {Adaptive Homography-Based Visual Servo Tracking Control Via A Quaternion Formulation},
year = {2010},
number = {1},
pages = {128-135},
volume = {18},
keywords = {robotpub, aeropub, satellite, Guoqiang},
timestamp = {2016.06.02},
url = {http://ncr.mae.ufl.edu/papers/CST10.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/CST10.pdf},
}
@InProceedings{Hu2007d,
author = {G. Hu and N. Gans and S. Mehta and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Control Appl.},
title = {Daisy Chaining Based Visual Servo Control Part {II}: Extensions, Applications and Open Problems},
year = {2007},
address = {Suntec City, Singapore},
month = {Oct.},
pages = {729-734},
keywords = {robotpub, Vision Estimation, aeropub, satellite, UAV, Guoqiang},
timestamp = {2016.06.02},
}
@InProceedings{Hu2007b,
author = {G. Hu and N. R. Gans and W. E. Dixon},
booktitle = {IEEE Multi-Conf. Syst. and Contr.},
title = {Quaternion-Based Visual Servo Control in the Presence of Camera Calibration Error},
year = {2007},
address = {Suntec City, Singapore},
month = {Oct.},
pages = {1492-1497},
keywords = {robotpub, Vision Estimation, Guoqiang},
timestamp = {2016.06.02},
}
@InProceedings{Hu2006,
author = {G. Hu and S. Gupta and N. Fitz-coy and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Lyapunov-Based Visual Servo Tracking Control via a Quaternion Formulation},
year = {2006},
address = {San Diego, California},
month = {Dec.},
pages = {3861-3866},
keywords = {robotpub, satellite, Vision Control, aeropub, Guoqiang},
timestamp = {2016.06.02},
}
@InProceedings{Hu2008a,
author = {G. Hu and W. MacKunis and N. Gans and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Adaptive Homography-Based Visual Servo Control via an Uncalibrated Camera},
year = {2008},
address = {Seattle, WA, USA},
month = {Jun.},
pages = {4791-4796},
keywords = {robotpub, Vision control, Guoqiang},
timestamp = {2016.06.02},
}
@Article{Hu2009a,
Title = {Homography-Based Visual Servo Control with Imperfect Camera Calibration},
Author = {G. Hu and W. Mackunis and N. Gans and W. E. Dixon and J. Chen and A. Behal and D.M. Dawson},
Journal = {IEEE Trans. Autom. Control},
Year = {2009},
Number = {6},
Pages = {1318-1324},
Volume = {54},
Keywords = {robotpub, Vision Control, Guoqiang},
Timestamp = {2016.06.02},
Url = {http://ncr.mae.ufl.edu/papers/tac09.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/tac09.pdf}
}
@Article{Hu2007,
author = {G. Hu and C. Makkar and and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Energy-Based Nonlinear Control of Underactuated {E}uler-{L}agrange Systems Subject to Impacts},
year = {2007},
pages = {1742-1748},
volume = {52},
keywords = {robotpub, Impact, delay, Guoqiang},
timestamp = {2016.06.02},
url = {http://ncr.mae.ufl.edu/papers/tac07-2.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tac07_2.pdf},
}
@InProceedings{Hu2007c,
author = {G. Hu and S. Mehta and N. Gans and W. E. Dixon},
booktitle = {IEEE Multi-Conf. Syst. and Contr.},
title = {Daisy Chaining Based Visual Servo Control Part {I}: Adaptive Quaternion-Based Tracking Control},
year = {2007},
address = {Suntec City, Singapore},
month = {Oct.},
pages = {1474-1479},
keywords = {robotpub, satellite, aeropub, Vision Control, UAV, Guoqiang},
timestamp = {2016.06.02},
}
@InProceedings{Hu2010b,
Title = {Robust Tracking Control of an Array of Nanoparticles Moving on a Substrate},
Author = {G. Hu and F. D. Sahneh and W. E. Dixon},
Booktitle = {Proc. IEEE Int. Symp. Intell. Control},
Year = {2010},
Address = {Yokohama, Japan},
Month = {Sep.},
Pages = {2290-2295},
Keywords = {theory, Guoqiang},
Timestamp = {2016.06.02}
}
@InProceedings{Hu2005,
author = {G. Q. Hu and W. E. Dixon and C. Makkar},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Energy-Based Nonlinear Control of Underactuated {E}uler-{L}agrange Systems Subject to Impacts},
year = {2005},
address = {Seville, Spain},
month = {Dec.},
pages = {6859-6864},
keywords = {robotpub, Impact, delay, Guoqiang},
timestamp = {2016.06.02},
}
@InProceedings{Jang.Dani.ea2012,
author = {S. Jang and A. Dani and C. Crane and W. E. Dixon},
booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
title = {Experimental Results for Moving Object Structure Estimation Using an Unknown Input Observer Approach},
year = {2012},
address = {Fort Lauderdale, Florida},
month = {Oct.},
keywords = {RISE, robotpub, Vision Estimation},
owner = {wdixon},
timestamp = {2013.01.03},
}
@PhdThesis{Johnson2011,
author = {M. Johnson},
school = {University of Florida},
title = {Differential Game-Based Control Methods for Uncertain Continuous-Time Nonlinear Systems},
year = {2011},
keywords = {RISE, Optimal, NN, theory, learning, Reinforced learning},
timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/johnson.pdf},
}
@InProceedings{Johnson2011a,
author = {M. Johnson and S. Bhasin and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Nonlinear Two-player Zero-sum Game Approximate Solution Using a Policy Iteration Algorithm},
year = {2011},
pages = {142-147},
keywords = {Optimal, NN, theory, learning, Reinforced learning},
}
@InProceedings{Johnson2010,
author = {M. Johnson and T. Hiramatsu and N. Fitz-Coy and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Asymptotic Stackelberg Optimal Control Design for an Uncertain {E}uler-{L}agrange System},
year = {2010},
address = {Atlanta, GA},
pages = {6686-6691},
keywords = {RISE, Optimal, theory},
}
@InProceedings{Johnson2009,
author = {M. Johnson and G. Hu and K. Dupree and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Inverse Optimal Homography-Based Visual Servo Control via an Uncalibrated Camera},
year = {2009},
address = {Shanghai, China},
month = {Jan.},
pages = {2408-2413},
keywords = {vision, Optimal, theory, Guoqiang},
timestamp = {2016.06.02},
}
@Article{Johnson.Kamalapurkar.ea2015,
author = {M. Johnson and R. Kamalapurkar and S. Bhasin and W. E. Dixon},
journal = {IEEE Trans. on Neural Netw. Learn. Syst.},
title = {Approximate N-Player Nonzero-Sum Game Solution for an Uncertain Continuous Nonlinear System},
year = {2015},
month = {Aug.},
number = {8},
pages = {1645-1658},
volume = {26},
keywords = {RISE, Optimal, NN, theory, learning, Reinforced learning},
owner = {wdixon},
timestamp = {2014.05.30},
url1 = {http://ncr.mae.ufl.edu/papers/TNN15.pdf},
}
@Article{Jung2004,
Title = {Ergonomic interface concepts for minimally invasive, remote, and virtual surgical systems},
Author = {D. L. Jung and W. E. Dixon and F. G. Pin},
Journal = {Stud. Health Tech. Info.},
Year = {2004},
Pages = {144-146},
Volume = {98},
Keywords = {Robotpub}
}
@InProceedings{Jung2004a,
Title = {Automated Kinematic Generator for Surgical Robotic Systems},
Author = {D. L. Jung and W. E. Dixon and F. G. Pin},
Booktitle = {Medicine Meets Virtual Reality Conference},
Year = {2004},
Address = {Newport Beach, California},
Month = {Jan.},
Pages = {144-146},
Keywords = {Robotpub}
}
@PhdThesis{Kaiser2008,
Title = {Vision-Based Estimation, Localization, And Control Of An Unmanned Aerial Vehicle},
Author = {K. Kaiser},
School = {University of Florida},
Year = {2008},
Keywords = {vision, aeropub},
Owner = {wdixon},
Timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/kent.pdf},
}
@Article{Kaiser2010,
author = {K. Kaiser and N. Gans and W. E. Dixon},
journal = {IEEE Trans. Aero. and Elect. Sys.},
title = {Vision-Based State Estimation and Control of an Aerial Vehicle through Chained Homography Reconstruction},
year = {2010},
number = {3},
pages = {1064-1077},
volume = {46},
keywords = {robotpub, aeropub, Vision Estimaton, Vision Control, UAV},
url = {http://ncr.mae.ufl.edu/papers/TAES10.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/TAES10.pdf},
}
@InProceedings{Kaiser2006,
author = {K. Kaiser and N. Gans and S. Mehta and W. E. Dixon},
booktitle = {Proc. AIAA Guid. Navig. Control Conf.},
title = {Position and Orientation of an Aerial Vehicle through Chained, Vision-Based Pose Reconstruction},
year = {2006},
address = {Keystone, Colorado},
keywords = {UAV, aeropub, robotpub, Vision Control},
}
@InProceedings{Kaiser2007,
author = {K. Kaiser and N. R. Gans and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Localization and Control of an Aerial Vehicle through Chained, Vision-Based Pose Reconstruction},
year = {2007},
address = {York, NY},
month = {Jul.},
pages = {5934-5939},
keywords = {aeropub, robotpub, UAV, Vision Control},
}
@PhdThesis{Kamalapurkar2014,
author = {R. Kamalapurkar},
school = {University of Florida},
title = {Model-Based Reinforcement Learning for Online Approximate Optimal Control},
year = {2014},
keywords = {Optimal, NN, theory, learning, Reinforced learning},
owner = {wdixon},
timestamp = {2014.09.02},
url1 = {http://ncr.mae.ufl.edu/dissertations/rushi.pdf},
}
@Article{Kamalapurkar.Andrews.ea2017,
author = {R. Kamalapurkar and L. Andrews and P. Walters and W. E. Dixon},
journal = {IEEE Trans. Neural Netw. Learn. Syst.},
title = {Model-based reinforcement learning for infinite-horizon approximate optimal tracking},
year = {2017},
number = {3},
pages = {753-758},
volume = {28},
keywords = {Optimal, NN, theory, Reinforcement learning},
owner = {wdixon},
timestamp = {2017.04.13},
url1 = {http://ncr.mae.ufl.edu/papers/tnn17.pdf},
}
@InProceedings{Kamalapurkar.Andrews.ea2014,
author = {R. Kamalapurkar and L. Andrews and P. Walters and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Model-based reinforcement learning for infinite-horizon approximate optimal tracking},
year = {2014},
address = {Los Angeles, CA},
month = {Dec.},
pages = {5083-5088},
keywords = {Optimal, Saturated, NN, theory, Reinforced learning},
owner = {wdixon},
timestamp = {2014.07.21},
}
@InProceedings{Kamalapurkar.Bialy.ea2013,
author = {R. Kamalapurkar and B. Bialy and L. Andrews and W. E. Dixon},
booktitle = {Proc. AIAA Guid., Navig., Control Conf.},
title = {Adaptive {RISE} Feedback Control Strategies for Systems with Structured and Unstructured Uncertainties},
year = {2013},
month = {Aug.},
keywords = {theory, RISE},
owner = {wdixon},
timestamp = {2013.04.30},
}
@Article{Kamalapurkar.Dinh.ea2015,
author = {Rushikesh Kamalapurkar and Huyen Dinh and Shubhendu Bhasin and Warren E. Dixon},
journal = {Automatica},
title = {Approximate Optimal Trajectory Tracking for Continuous-Time Nonlinear Systems},
year = {2015},
month = {Jan.},
pages = {40--48},
volume = {51},
keywords = {Optimal, NN, theory, learning, Reinforcment learning},
owner = {rkamalapurkar},
timestamp = {2014.09.16},
url1 = {http://ncr.mae.ufl.edu/papers/auto15.pdf},
}
@InProceedings{Kamalapurkar.Dinh.ea2013,
author = {R. Kamalapurkar and H. T. Dinh and P. Walters and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Approximate optimal cooperative decentralized control for consensus in a topological network of agents with uncertain nonlinear dynamics},
year = {2013},
address = {Washington, DC},
month = {Jun.},
pages = {1322-1327},
keywords = {Optimal, NN, theory, learning, Reinforced learning, networkpub},
owner = {wdixon},
timestamp = {2013.01.31},
}
@Article{Kamalapurkar.Dixon.ea2020,
Title = {On reduction of differential inclusions and Lyapunov stability},
Author = {R. Kamalapurkar and W. E. Dixon and A. Teel},
Journal = {ESAIM: Control, Optim. Calc. of Var.},
Year = {2020},
Number = {24},
Pages = {1-16},
Volume = {26},
Keywords = {theory},
Url1 = {http://ncr.mae.ufl.edu/papers/cocv20.pdf}
}
@InProceedings{Kamalapurkar.Dixon.ea2017,
Title = {On reduction of differential inclusions and Lyapunov stability},
Author = {R. Kamalapurkar and W. E. Dixon and A. R. Teel},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2017},
Pages = {5499-5504},
Keywords = {theory, switched},
Owner = {wdixon},
Timestamp = {2018.01.11}
}
@Article{Kamalapurkar.Fischer.ea2016,
author = {R. Kamalapurkar and N. Fischer and S. Obuz and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Time-Varying Input and State Delay Compensation for Uncertain Nonlinear Systems},
year = {2016},
number = {3},
pages = {834-839},
volume = {61},
keywords = {delay, theory},
owner = {wdixon},
timestamp = {2016.05.04},
url1 = {http://ncr.mae.ufl.edu/papers/tac16.pdf},
}
@InProceedings{Kamalapurkar.Klotz.ea2014,
author = {Rushikesh Kamalapurkar and Justin Klotz and Warren E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Model-based reinforcement learning for on-line feedback-{N}ash equilibrium solution of {N}-player nonzero-sum differential games},
year = {2014},
pages = {3000-3005},
keywords = {Optimal, NN, theory, learning},
owner = {wdixon},
timestamp = {2014.01.31},
}
@Article{Kamalapurkar.Klotz.ea2014a,
author = {R. Kamalapurkar and J. Klotz and W. E. Dixon},
journal = {IEEE/CAA J. Autom. Sin.},
title = {Concurrent learning-based online approximate feedback {N}ash equilibrium solution of {N}-player nonzero-sum differential games},
year = {2014},
month = {Jul.},
number = {3},
pages = {239--247},
volume = {1},
keywords = {Optimal, NN, theory, learning},
owner = {wdixon},
timestamp = {2014.01.17},
url1 = {http://ncr.mae.ufl.edu/papers/JAS2014.pdf},
}
@Article{Kamalapurkar.Klotz.ea2018,
author = {R. Kamalapurkar and J. R. Klotz and P. Walters and W. E. Dixon},
journal = {IEEE Trans. Control Netw. Syst.},
title = {Model-based reinforcement learning for differential graphical games},
year = {2018},
number = {1},
pages = {423-433},
volume = {5},
keywords = {learning, NN, adaptive, theory, optimal, networkpub},
owner = {wdixon},
timestamp = {2018.03.18},
url1 = {http://ncr.mae.ufl.edu/papers/TCNS18b.pdf},
}
@Article{Kamalapurkar.Reish.ea2017,
author = {R. Kamalapurkar and B. Reish and G. Chowdhary and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Concurrent learning for parameter estimation using dynamic state-derivative estimators},
year = {2017},
month = {July},
number = {7},
pages = {3594-3601},
volume = {62},
keywords = {concurrent learning, NN, adaptive control, theory},
owner = {wdixon},
timestamp = {2017.08.02},
url1 = {http://ncr.mae.ufl.edu/papers/TAC17.pdf},
}
@InProceedings{Kamalapurkar.Rosenfeld.ea2015,
Title = {State Following ({S}ta{F}) Kernel Functions for Function Approximation {P}art {II}: Adaptive Dynamic Programming},
Author = {Rushikesh Kamalapurkar and Joel A. Rosenfeld and Warren E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2015},
Pages = {521-526},
Keywords = {Optimal, theory, learning},
Owner = {wdixon},
Timestamp = {2015.02.09}
}
@Article{Kamalapurkar.Rosenfeld.ea2019,
Title = {Invariance-like Results for Nonautonomous Switched Systems},
Author = {R. Kamalapurkar and J. A. Rosenfeld and A. Parikh and A. R. Teel and W. E. Dixon},
Journal = {IEEE Trans. Autom. Control},
Year = {2019},
Month = feb,
Number = {2},
Pages = {614-627},
Volume = {64},
Keywords = {theory},
Owner = {wdixon},
Timestamp = {2018.03.20},
Url1 = {http://ncr.mae.ufl.edu/papers/tac19.pdf}
}
@Article{Kamalapurkar2016,
Title = {Efficient model-based reinforcement learning for approximate online optimal control},
Author = {R. Kamalapurkar and J. Rosenfeld and W. E. Dixon},
Journal = {Automatica},
Year = {2016},
Month = {Dec.},
Pages = {247-258},
Volume = {74},
Keywords = {theory, Reinforcement learning, NN},
Owner = {wdixon},
Timestamp = {2016.06.28},
Url1 = {http://ncr.mae.ufl.edu/papers/auto164.pdf}
}
@InBook{Kamalapurkar.Walters.ea2016a,
Title = {Control of Complex Systems: Theory and Applications},
Author = {R. Kamalapurkar and P. Walters and W.E. Dixon},
Chapter = {Model-Based Reinforcement Learning for Approximate Optimal Regulation},
Editor = {K. G. Vamvoudakis and S. Jagannathan},
Pages = {247-273},
Publisher = {Butterworth-Heinemann: Elsevier},
Year = {2016},
Keywords = {learning, optimal, NN, theory},
Owner = {wdixon},
Timestamp = {2016.07.29}
}
@Article{Kamalapurkar.Walters.ea2016,
author = {R. Kamalapurkar and P. Walters and W. E. Dixon},
journal = {Automatica},
title = {Model-based reinforcement learning for approximate optimal regulation},
year = {2016},
pages = {94--104},
volume = {64},
keywords = {Optimal, NN, theory, learning, Reinforcment learning},
owner = {wdixon},
timestamp = {2015.06.28},
url1 = {http://ncr.mae.ufl.edu/papers/auto16.pdf},
}
@InProceedings{Kamalapurkar.Walters.ea2013,
author = {R. Kamalapurkar and P. Walters and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Concurrent learning-based approximate optimal regulation},
year = {2013},
address = {Florence, IT},
month = {Dec.},
pages = {6256-6261},
keywords = {Optimal, NN, theory, learning},
owner = {wdixon},
timestamp = {2013.07.19},
}
@Book{Kamalapurkar.Walters.ea2018,
Title = {Reinforcement learning for optimal feedback control: A Lyapunov-based approach},
Author = {R. Kamalapurkar and P. S. Walters and J. A. Rosenfeld and W. E. Dixon},
Publisher = {Springer},
Year = {2018},
Keywords = {Optimal, NN, Learning, robotpub, theory, aeropub},
Owner = {wdixon},
Timestamp = {2018.02.12}
}
@PhdThesis{Kan2011b,
Title = {Potential Field-Based Decentralized Control Methods For Network Connectivity Maintenance},
Author = {Z. Kan},
School = {University of Florida},
Year = {2011},
Keywords = {networkpub},
Owner = {wdixon},
Timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/zhen.pdf},
}
@InProceedings{Kan2011,
author = {Z. Kan and A. Dani and J. Shea and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Ensuring Network Connectivity for Nonholonomic Robots During Rendezvous},
year = {2011},
address = {Orlando, FL},
pages = {2369-2374},
keywords = {robotpub, networkpub, WMR},
}
@InProceedings{Kan2011a,
author = {Z. Kan and A. Dani and J. Shea and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Information Flow Based Connectivity Maintenance of A Multi-agent System During Formation Control},
year = {2011},
address = {Orlando, FL},
pages = {2375-2380},
keywords = {robotpub, Networkpub, delay},
}
@Article{Kan.Dani.ea2012,
author = {Z. Kan and A. Dani and J. M. Shea and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Network Connectivity Preserving Formation Stabilization and Obstacle Avoidance via A Decentralized Controller},
year = {2012},
number = {7},
pages = {1827-1832},
volume = {57},
keywords = {robotpub, Networkpub},
url1 = {http://ncr.mae.ufl.edu/papers/tac12_3.pdf},
}
@InProceedings{Kan2010,
author = {Z. Kan and A. Dani and J. M. Shea and W. E. Dixon},
booktitle = {Proc. IEEE Mil. Commun. Conf.},
title = {Ensuring Network Connectivity During Formation Control Using A Decentralized Navigation Function},
year = {2010},
address = {San Jose, CA},
pages = {954-959},
keywords = {robotpub, networkpub},
}
@Article{Kan.Doucette.ea2019,
author = {Z. Kan and E. Doucette and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Distributed Connectivity Preserving Target Tracking with Random Sensing},
year = {2019},
number = {5},
pages = {2166-2173},
volume = {64},
keywords = {robotpub, networkpub, theory},
url1 = {http://ncr.mae.ufl.edu/papers/tac19_2.pdf},
}
@InProceedings{Kan.Klotz.ea2012,
author = {Z. Kan and J. Klotz and T.-H. Cheng and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Ensuring Network Connectivity for Nonholonomic Robots During Decentralized Rendezvous},
year = {2012},
address = {Montr\'{e}al, Canada},
month = {Jun.},
pages = {3718-3723},
keywords = {robotpub, Networkpub, WMR},
timestamp = {2017-07-06},
}
@Article{Kan.Klotz.ea2015,
Title = {Containment Control for a Social Network with State-Dependent Connectivity},
Author = {Zhen Kan and Justin Klotz and Eduardo L. Pasiliao Jr and Warren E. Dixon},
Journal = {Automatica},
Year = {2015},
Pages = {86-92},
Volume = {56},
Keywords = {Networkpub},
Owner = {wdixon},
Timestamp = {2015.03.11},
Url1 = {http://ncr.mae.ufl.edu/papers/auto15_2.pdf}
}
@Article{Kan.Klotz.ea2017,
Title = {Decentralized Rendezvous of Nonholonomic Robots with Sensing and Connectivity Constraints},
Author = {Z. Kan and J. R. Klotz and E. Doucette and J. Shea and W. E. Dixon},
Journal = {ASME J. Dyn. Syst. Meas. Control},
Year = {2017},
Number = {2},
Pages = {024501-1-024501-7},
Volume = {139},
Keywords = {robotpub, WMR, networkpub},
Timestamp = {2017.02.09},
Url1 = {http://ncr.mae.ufl.edu/papers/JDSMC17.pdf}
}
@InProceedings{Kan.Mehta.ea2014,
Title = {Balanced Containment Control and Cooperative Timing of a Multi-Agent System},
Author = {Z. Kan and S. Mehta and E. Pasiliao and J. W. Curtis and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2014},
Pages = {281-286},
Keywords = {Networkpub},
Owner = {wdixon},
Timestamp = {2014.01.31}
}
@Article{Kan.Mehta.ea2018,
Title = {Balanced Containment Control and Cooperative Timing of a Multi-Agent System over Random Communication Graphs},
Author = {Z. Kan and S. Mehta and J. Shea and J. W. Curtis and W. E. Dixon},
Journal = {Int. J. Robust Nonlinear Control},
Year = {2018},
Number = {11},
Pages = {3574-3588},
Volume = {28},
Keywords = {robotpub, networkpub, theory},
Url1 = {http://ncr.mae.ufl.edu/papers/IJRNC18.pdf}
}
@Article{Kan.Navaravong.ea2015,
author = {Z. Kan and L. Navaravong and J. Shea and E. Pasiliao and W. E. Dixon},
journal = {IEEE Trans. Control Netw. Syst.},
title = {Graph Matching Based Formation Reconfiguration of Networked Agents with Connectivity Maintenance},
year = {2015},
month = {Mar.},
number = {1},
pages = {24-35},
volume = {2},
keywords = {robotpub, networkpub},
owner = {wdixon},
timestamp = {2014.08.28},
url1 = {http://ncr.mae.ufl.edu/papers/tcns2015.pdf},
}
@InProceedings{Kan.Pasiliao.ea2012,
Title = {Particle Filter Based Average Consensus Target Tracking with Preservation of Network Connectivity},
Author = {Z. Kan and E. L. Pasiliao and J. W. Curtis and W. E. Dixon},
Booktitle = {Proc. IEEE Mil. Commun. Conf.},
Year = {2012},
Pages = {760-765},
Keywords = {networkpub},
Owner = {wdixon},
Timestamp = {2013.01.03}
}
@Article{Kan.Shea.ea2016a,
Title = {Leader-Follower Containment Control Over Directed Random Graphs},
Author = {Zhen Kan and John Shea and Warren E Dixon},
Journal = {Automatica},
Year = {2016},
Pages = {56-62},
Volume = {66},
Keywords = {robotpub, Networkpub, switched},
Owner = {wdixon},
Timestamp = {2016.05.04},
Url1 = {http://ncr.mae.ufl.edu/papers/auto162.pdf}
}
@InBook{Kan.Shea.ea2014,
Title = {Examining Robustness and Vulnerability of Networked Systems},
Author = {Z. Kan and J. M. Shea and W. E. Dixon},
Chapter = {Navigation Function Based Decentralized Control of A Multi-Agent System with Network Connectivity Constraints},
Editor = {S. Butenko and E. L. Pasiliao and V. Shylo},
Pages = {104-119},
Publisher = {NATO},
Year = {2014},
Series = {Science for Peace and Security Series - D: Information and Communication Security},
Volume = {35},
Keywords = {Networkpub},
Owner = {wdixon},
Timestamp = {2014.07.21}
}
@InProceedings{Kan.Shea.ea2012,
Title = {Influencing Emotional Behavior in a Social Network},
Author = {Z. Kan and J. M. Shea and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2012},
Address = {Montr\'{e}al, Canada},
Month = {Jun.},
Pages = {4072-4077},
Keywords = {Networkpub},
Timestamp = {2017-07-06}
}
@InProceedings{Kan.Shea.ea2016,
Title = {Coverage Control Based Effective Jamming Strategy for Wireless Networks},
Author = {Z. Kan and J. M. Shea and E. Doucette and J. W. Curtis and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2016},
Pages = {4655-4660},
Keywords = {Networkpub, Jamming, Robotpub},
Timestamp = {2016.07.11}
}
@InProceedings{Kan2010a,
author = {Z. Kan and S. Subramanian and J.M. Shea and W. E. Dixon},
booktitle = {IEEE Multi-Conf. Syst. and Control},
title = {Vision Based Connectivity Maintenance of a Network with Switching Topology},
year = {2010},
address = {Yokohama, Japan},
month = {Sep.},
pages = {1493-1498},
keywords = {networkpub, delay, Vision Estimation},
}
@Article{Kawai.Bellman.ea2019,
Title = {Closed-Loop Position and Cadence Tracking Control for {FES}-Cycling Exploiting Pedal Force Direction with Antagonistic Bi-Articular Muscles},
Author = {H. Kawai and M. Bellman and R. Downey and W. E. Dixon},
Journal = {IEEE Trans. Control Syst. Tech.},
Year = {2019},
Month = feb,
Number = {2},
Pages = {730-742},
Volume = {27},
Keywords = {NMES},
Owner = {wdixon},
Timestamp = {2017.11.01},
Url1 = {http://ncr.mae.ufl.edu/papers/cst19.pdf}
}
@InProceedings{Kawai.Bellman.ea2014,
Title = {Tracking Control for {FES}-Cycling based on Force Direction Efficiency with Antagonistic Bi-Articular Muscles},
Author = {H. Kawai and M. J. Bellman and R. J. Downey and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2014},
Pages = {5484-5489},
Keywords = {RISE, NMES},
Owner = {wdixon},
Timestamp = {2014.01.31}
}
@InProceedings{Kawai.Downey.ea2014,
author = {Y. Kawai and R. J. Downey and H. Kawai and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Co-Contraction of Antagonist Bi-Articular Muscles for Tracking Control of Human Limb},
year = {2014},
pages = {3316-3321},
keywords = {RISE, Optimal, NMES},
owner = {wdixon},
timestamp = {2014.01.31},
}
@PhdThesis{Kim2011d,
author = {D. Kim},
school = {University of Florida},
title = {A Novel Integrated Spacecraft Attitude Control System Using Variable Speed Control Moment Gyroscopes: A Lyapunov-Based Approach},
year = {2011},
keywords = {NN, aeropub},
owner = {wdixon},
timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/dohee.pdf},
}
@InProceedings{Kim2011,
Title = {Robust Composite Adaptive Fuzzy Identification and Control for a Class of {MIMO} Nonlinear Systems},
Author = {D. Kim and H. T. Chung and S. Bhasin and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2011},
Address = {San Francisco, CA},
Pages = {4947-4952},
Keywords = {RISE}
}
@InProceedings{Kim.Dinh.ea2012,
author = {D. Kim and H. T. Dinh and W. MacKunis and N. Fitz-Coy and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {A Recurrent Neural Network (RNN)-based Attitude Control Method for a {VSCMG}-actuated Satellite},
year = {2012},
address = {Montr\'{e}al, Canada},
month = {Jun.},
pages = {944-949},
keywords = {NN, satellite, aeropub},
timestamp = {2017-07-06},
}
@InProceedings{Kim2011b,
Title = {Integrated Power Reduction and Adaptive Attitude Control System of a {VSCMG}-Based Satellite},
Author = {D. Kim and F. A. Leve and N. Fitz-Coy and W. E. Dixon},
Booktitle = {AAS/AIAA Space Flight Mech. Meet.},
Year = {2011},
Address = {Orleans, LA},
Pages = {493-502},
Keywords = {satellite, aeropub}
}
@Article{Kim.Leve.ea2012,
author = {D. Kim and F. Leve and N. Fitz-Coy and W. E. Dixon},
journal = {AIAA J. Guid. Control Dyn.},
title = {A New Initial Start-up Method Using Internal Momentum Management of {VSCMG}s},
year = {2012},
number = {5},
pages = {1472-1482},
volume = {35},
keywords = {satellite, aeropub},
owner = {wdixon},
timestamp = {2012.10.22},
url1 = {http://ncr.mae.ufl.edu/papers/JGCD12.pdf},
}
@InProceedings{Kim2011a,
author = {D. Kim and F. Leve and N. Fitz-Coy and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Adaptive Attitude Control for a Small Satellite with Integrated Singularity Avoidance and Momentum Management},
year = {2011},
address = {San Francisco, CA},
pages = {1015-1020},
keywords = {satellite, aeropub},
}
@Article{Kim2011c,
author = {D. Kim and W. Mackunis and N. Fitz-Coy and W. E. Dixon},
journal = {J. Astronaut. Sci.},
title = {Precision {IPACS} in the Presence of Dynamic Uncertainty},
year = {2011},
number = {1},
volume = {58},
keywords = {satellite, aeropub},
}
@InProceedings{Kim2009,
author = {D. Kim and W. Mackunis and N. Fitz-Coy and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Precision IPACS in the Presence of Dynamic Uncertainty},
year = {2009},
address = {Shanghai, China},
month = {Jan.},
pages = {5959-5964},
keywords = {satellite, aeropub},
}
@InProceedings{Klotz.Andrews.ea2015,
Title = {Decentralized Monitoring of Leader-Follower Networks of Uncertain Nonlinear Systems},
Author = {J. Klotz and L. Andrews and R. Kamalapurkar and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2015},
Month = {Jul.},
Pages = {1393-1398},
Keywords = {networkpub},
Owner = {wdixon},
Timestamp = {2015.02.09}
}
@Article{Klotz.Cheng.ea2016,
Title = {Robust Containment Control in a Leader-Follower Network of Uncertain Euler-Lagrange Systems},
Author = {J. Klotz and T.-H. Cheng and W. E. Dixon},
Journal = {Int. J. Robust Nonlinear Control},
Year = {2016},
Pages = {3791-3805},
Volume = {26},
Keywords = {networkpub, RISE},
Owner = {wdixon},
Timestamp = {2016.11.08},
Url1 = {http://ncr.mae.ufl.edu/papers/IJRNC16.pdf}
}
@InProceedings{Klotz.Kamalapurkar.ea2014,
author = {J. Klotz and R. Kamalapurkar and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Concurrent Learning-Based Network Synchronization},
year = {2014},
pages = {796-801},
keywords = {networkpub, NN, theory, learning},
owner = {wdixon},
timestamp = {2014.01.31},
}
@InProceedings{Klotz.Kan.ea2013,
author = {J. Klotz and Z. Kan and J. M. Shea and E. L. Pasiliao and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Asymptotic Synchronization of Leader-Follower Networks of Uncertain {E}uler-{L}agrange Systems},
year = {2013},
address = {Florence, IT},
month = {Dec.},
pages = {6536-6541},
keywords = {RISE, robotpub, networkpub},
owner = {wdixon},
timestamp = {2013.07.19},
}
@PhdThesis{Klotz2015,
Title = {Decentralized Control of Networks of Uncertain Dynamical Systems},
Author = {J. R. Klotz},
School = {University of Florida},
Year = {2015},
Keywords = {networkpub},
Owner = {jklotz},
Timestamp = {2015.04.01},
url1 = {http://ncr.mae.ufl.edu/dissertations/klotz.pdf},
}
@Article{Klotz.Kan.ea2015,
author = {J. R. Klotz and Z. Kan and J. M. Shea and E. L. Pasiliao and W. E. Dixon},
journal = {IEEE Trans. Control Netw. Syst.},
title = {Asymptotic Synchronization of a Leader-Follower Network of Uncertain {E}uler-{L}agrange Systems},
year = {2015},
month = {Jun.},
number = {2},
pages = {174-182},
volume = {2},
keywords = {RISE, robotpub, networkpub},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/tcns2015_2.pdf},
}
@Article{Klotz.Obuz.ea2018,
Title = {Synchronization of Uncertain Euler-Lagrange Systems with Uncertain Time-Varying Communication Delays},
Author = {J. R. Klotz and S. Obuz and Z. Kan and W. E. Dixon},
Journal = {IEEE Trans. Cybern.},
Year = {2018},
Number = {2},
Pages = {807-817},
Volume = {48},
Keywords = {networkpub, delay},
Owner = {wdixon},
Timestamp = {2018.01.10},
Url1 = {http://ncr.mae.ufl.edu/papers/Cyber18.pdf}
}
@InProceedings{Klotz.Obuz.ea2015,
Title = {Synchronization of Uncertain {E}uler-{L}agrange Systems with Unknown Time-Varying Communication Delays},
Author = {Justin R. Klotz and Serhat Obuz and Zhen Kan and Warren E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2015},
Month = {Jul.},
Pages = {683-688},
Keywords = {networkpub, delay},
Owner = {jklotz},
Timestamp = {2014.12.01}
}
@Article{Klotz.Parikh.ea2018,
Title = {Decentralized Synchronization of Uncertain Nonlinear Systems with a Reputation Algorithm},
Author = {J. R. Klotz and A. Parikh and T.-H. Cheng and W. E. Dixon},
Journal = {IEEE Trans. Control Netw. Syst.},
Year = {2018},
Number = {1},
Pages = {434-445},
Volume = {5},
Keywords = {networkpub},
Owner = {wdixon},
Timestamp = {2018.03.18},
Url1 = {http://ncr.mae.ufl.edu/papers/TCNS18a.pdf}
}
@InProceedings{Kushima.Kawataka.ea2015,
author = {Yoshihiro Kushima and Kotaro Kawataka and Hiroyuki Kawai and Yasunori Kawai and Warren E. Dixon},
booktitle = {IEEE Multi-Conf. Syst. and Control},
title = {{FES} Knee Bending and Stretching System with {RISE}-based Tracking Control for Human Limb},
year = {2015},
address = {Sydney, Australia},
month = {Sep.},
pages = {870-875},
keywords = {RISE, NMES},
}
@MastersThesis{Laplassotte2012,
author = {C. Laplassotte},
school = {University of Florida},
title = {Needle Insertion for Robotic Surgery},
year = {2012},
keywords = {robotpub, delay, NN},
owner = {wdixon},
timestamp = {2012.08.27},
}
@InProceedings{Laplassotte.Cheng.ea2012,
Title = {Robotic Needle Insertion Into Viscoelastic Tissue},
Author = {C. Laplassotte and T.-H. Cheng and M. Bellman and W. E. Dixon and B. Bayle},
Booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
Year = {2012},
Address = {Fort Lauderdale, Florida},
Month = {Oct.},
Keywords = {robotpub},
Owner = {wdixon},
Timestamp = {2013.01.03}
}
@InProceedings{Le.Chen.ea2020,
author = {D. Le and H.-Y. Chen and A. R. Teel and W. E. Dixon},
booktitle = {IFAC World Congr.},
title = {Path Following with Stable and Unstable Modes Subject to Time-Varying Dwell-Time Conditions},
year = {2020},
keywords = {RT1, theory, Robotpub, DucLePub},
}
@Article{Lee.Dixon.ea2012,
Title = {Adaptive Nonlinear Contour Coupling Control for a Machine Tool System},
Author = {J. Lee and W. E. Dixon and J. C. Ziegert},
Journal = {Int. J. of Adv. Manuf. Technol.},
Year = {2012},
Number = {9-10},
Pages = {1057-1065},
Volume = {61},
Keywords = {Optimal, robotpub},
Owner = {wdixon},
Timestamp = {2012.10.22},
Url1 = {http://ncr.mae.ufl.edu/papers/Man12.pdf}
}
@InProceedings{Lee2005,
Title = {Adaptive Nonlinear Contour Coupling Control for a Machine Tool System},
Author = {J.-H. Lee and W. E. Dixon and J. C. Ziegert and C. Makkar},
Booktitle = {Proc. IEEE/ASME Int. Conf. Adv. Intell. Mechatron.},
Year = {2005},
Address = {Monterey, CA},
Month = {Jul.},
Pages = {1629-1634},
Keywords = {Optimal, robotpub}
}
@InProceedings{Liang2007,
author = {C. Liang and S. Bhasin and K. Dupree and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {An Impact Force Limiting Adaptive Controller for a Robotic System Undergoing a Non-Contact to Contact Transition},
year = {2007},
address = {New Orleans, LA},
pages = {3555-3560},
keywords = {robotpub, Impact},
}
@Article{Liang2009,
author = {C. H. Liang and S. Bhasin and K. Dupree and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Technol.},
title = {A Force Limiting Adaptive Controller for a Robotic System Undergoing a Non-Contact to Contact Transition},
year = {2009},
number = {6},
pages = {1330-1341},
volume = {17},
keywords = {robotpub, Impact},
url = {http://ncr.mae.ufl.edu/papers/CST09.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/CST09.pdf},
}
@PhdThesis{Licitra2017,
Title = {Autonomous Herding Of Uncontrolled Uncertain Agents: A Switched Systems Approach},
Author = {R. Licitra},
School = {University of Florida},
Year = {2017},
Keywords = {networkpub, herding, concurrent learning, adaptive, robotpub},
Owner = {wdixon},
Timestamp = {2017.11.27},
url1 = {http://ncr.mae.ufl.edu/dissertations/Ryan2017.pdf},
}
@Article{Licitra.Bell.ea2019,
author = {R. Licitra and Z. Bell and Warren Dixon},
journal = {IEEE Trans. Robotics},
title = {Single Agent Indirect Herding of Multiple Targets with Unknown Dynamics},
year = {2019},
number = {4},
pages = {847-860},
volume = {35},
keywords = {networkpub, herding, concurrent learning, adaptive, robotpub},
url1 = {http://ncr.mae.ufl.edu/papers/tro19_2.pdf},
}
@Article{Licitra.Bell.ea2018,
author = {R. Licitra and Z. I. Bell and E. Doucette and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Single Agent Indirect Herding of Multiple Targets: A Switched Adaptive Control Approach},
year = {2018},
month = {January},
number = {1},
pages = {127-132},
volume = {2},
keywords = {networkpub, herding, concurrent learning, adaptive, robotpub},
owner = {wdixon},
timestamp = {2017.10.30},
url1 = {http://ncr.mae.ufl.edu/papers/CSL18_2.pdf},
}
@InProceedings{Licitra.Hutcheson.ea2017,
Title = {Single Agent Herding of n-Agents: A Switched Systems Approach},
Author = {R. Licitra and Z. Hutcheson and E. Doucette and W. E. Dixon},
Booktitle = {IFAC World Congr.},
Year = {2017},
Pages = {14374-14379},
Keywords = {networkpub, switched, robotpub},
Owner = {wdixon},
Timestamp = {2018.01.11}
}
@InProceedings{Ma2007,
Title = {Fast Estimation for Range Identification in the Presence of Unknown Motion Parameters},
Author = {L. Ma and C. Cao and N. Hovakimyan and W. E. Dixon and C. Woolsey},
Booktitle = {Proc. Int. Conf. Info. Control Autom. Robot.},
Year = {2007},
Address = {Angers, France},
Month = {May},
Pages = {157-164},
Keywords = {Vision Estimation}
}
@InProceedings{Ma2007a,
Title = {Range Identification in the Presence of Unknown Motion Parameters for Perspective Vision Systems},
Author = {L. Ma and C. Cao and N. Hovakimyan and W. E. Dixon and C. Woolsey},
Booktitle = {Proc. Am. Control Conf.},
Year = {2007},
Address = {New York, NY},
Month = {Jul.},
Pages = {972-977},
Keywords = {Vision Estimation}
}
@Article{Ma2010,
Title = {Fast Estimation and Range Identification in the Presence of Unknown Motion Parameters},
Author = {L. Ma and C. Cao and N. Hovakimyan and C. Woolsey and W. E. Dixon},
Journal = {IMA J. of App. Math.},
Year = {2010},
Number = {2},
Pages = {165-189},
Volume = {75},
Keywords = {Vision Estimation}
}
@PhdThesis{Mackunis2009a,
Title = {Nonlinear Control For Systems Containing Input Uncertainty Via A Lyapunov-Based Approach},
Author = {W. Mackunis},
School = {University of Florida},
Year = {2009},
Keywords = {theory, RISE, aeropub},
Owner = {wdixon},
Timestamp = {2017-07-06},
url1 = {http://ncr.mae.ufl.edu/dissertations/will.pdf},
}
@Article{MacKunis2008,
Title = {Adaptive Satellite Attitude Control in the Presence of Inertia and {CMG} Gimbal Friction Uncertainties},
Author = {W. MacKunis and K. Dupree and N. Fitz-Coy and W. E. Dixon},
Journal = {J. Astronaut. Sci.},
Year = {2008},
Pages = {121-134},
Volume = {56},
Keywords = {satellite, aeropub},
Url = {http://ncr.mae.ufl.edu/papers/AAS08.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/AAS08.pdf}
}
@InProceedings{MacKunis2008c,
author = {W. MacKunis and K. Dupree and N. Fitz-Coy and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Adaptive Neural Network Satellite Attitude Control in the Presence of Inertia and {CMG} Actuator Uncertainties},
year = {2008},
address = {Seattle, WA, USA},
month = {Jun.},
pages = {2975-2980},
keywords = {NN, satellite, learning, aeropub},
}
@InProceedings{MacKunis2007a,
Title = {Adaptive Satellite Attitude Control in the Presence of Inertia and {CMG} Gimbal Friction Uncertainties},
Author = {W. MacKunis and K. Dupree and N. Fitz-Coy and W. E. Dixon},
Booktitle = {Proc. AIAA Guid. Navig. Control Conf.},
Year = {2007},
Address = {Hilton Head, SC},
Month = {Aug.},
Pages = {121-134},
Keywords = {satellite, aeropub}
}
@InProceedings{MacKunis2007,
author = {W. MacKunis and N. Gans and K. Kaiser and W. E. Dixon},
booktitle = {IEEE Multi-Conf. Syst. and Contr.},
title = {Unified Tracking and Regulation Visual Servo Control for Wheeled Mobile Robots},
year = {2007},
address = {Suntec City, Singapore},
month = {Oct.},
pages = {88-93},
keywords = {robotpub, WMR},
}
@Article{Mackunis.Gans.ea2014,
author = {W. Mackunis and N. Gans and A. Parikh and W. E. Dixon},
journal = {Asian J. Control},
title = {Unified Tracking and Regulation Visual Servo Control for Wheeled Mobile Robot},
year = {2014},
month = {May},
number = {3},
pages = {669-678},
volume = {16},
keywords = {robotpub, WMR},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/ajc14.pdf},
}
@InProceedings{MacKunis2008b,
author = {W. MacKunis and K. Kaiser and P. M. Patre and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Asymptotic Tracking for Aircraft via an Uncertain Dynamic Inversion Method},
year = {2008},
address = {Seattle, WA, USA},
month = {Jun.},
pages = {3482-3487},
keywords = {RISE, delay, hypersonic, aeropub},
}
@Article{MacKunis2010,
author = {W. MacKunis and K. Kaiser and Z. D. Wilcox and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Technol.},
title = {Global Adaptive Output Feedback Tracking Control of an Unmanned Aerial Vehicle},
year = {2010},
number = {6},
pages = {1390-1397},
volume = {18},
keywords = {NN, UAV, theory, robotpub, aeropub},
url = {http://ncr.mae.ufl.edu/papers/CST10-1.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/CST10_1.pdf},
}
@InProceedings{MacKunis2008a,
Title = {Adaptive Dynamic Inversion for Asymptotic Tracking of an Aircraft Reference Model},
Author = {W. MacKunis and M. K. Kaiser and P. M. Patre and W. E. Dixon},
Booktitle = {Proc. AIAA Guid. Navig. Control Conf.},
Year = {2008},
Address = {Honolulu, Hawaii},
Month = {Aug.},
Pages = {3482-3487},
Keywords = {satellite, NN, aeropub},
Timestamp = {2016.05.31}
}
@Article{Mackunis.Leve.ea2016,
Title = {Adaptive Neural Network-based Satellite Attitude Control in the Presence of {CMG} Uncertainty},
Author = {W. Mackunis and F. Leve and P. Patre and N. Fitz-Coy and W. E. Dixon},
Journal = {Aerosp. Sci. Technol.},
Year = {2016},
Pages = {218-228},
Volume = {54},
Keywords = {satellite, NN, aeropub},
Owner = {wdixon},
Timestamp = {2016.05.31},
Url1 = {http://ncr.mae.ufl.edu/papers/ast16.pdf}
}
@Article{MacKunis2010a,
author = {W. MacKunis and P. Patre and M. Kaiser and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Technol.},
title = {Asymptotic Tracking for aircraft via robust and adaptive dynamic inversion methods},
year = {2010},
number = {6},
pages = {1448-1456},
volume = {18},
keywords = {RISE, UAV, aeropub},
url = {http://ncr.mae.ufl.edu/papers/CST10-2.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/CST10_2.pdf},
}
@InProceedings{MacKunis2009,
Title = {Global Adaptive Output Feedback MRAC},
Author = {W. MacKunis and Z. D. Wilcox and M. K. Kaiser and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2009},
Address = {Shanghai, China},
Month = {Jan.},
Pages = {3483-3488},
Keywords = {UAV, theory, aeropub}
}
@InProceedings{Makkar2005,
Title = {A New Continuously Differentiable Friction Model for Control Systems Design},
Author = {C. Makkar and W. E. Dixon and W. G. Sawyer and G.Hu},
Booktitle = {Proc. IEEE/ASME Int. Conf. Adv. Intell. Mechatron.},
Year = {2005},
Address = {Monterey, CA},
Month = {Jul.},
Pages = {600-605},
Keywords = {Guoqiang, RISE, robotpub}
}
@InProceedings{Makkar2005a,
Title = {Lyapunov-Based Tracking Control in the Presence of Uncertain Nonlinear Parameterizable Friction},
Author = {C. Makkar and W. E. Dixon and W. G. Sawyer and G. Hu},
Booktitle = {Proc. Am. Control Conf.},
Year = {2005},
Address = {Portland, Oregon},
Month = {Jun.},
Pages = {1975-1980},
Keywords = {learning, Guoqiang, RISE, robotpub},
Timestamp = {2016.06.02}
}
@Article{Makkar2007,
author = {C. Makkar and G. Hu and W. G. Sawyer and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Lyapunov-Based Tracking Control in the Presence of Uncertain Nonlinear Parameterizable Friction},
year = {2007},
pages = {1988-1994},
volume = {52},
keywords = {RISE, learning, Guoqiang},
timestamp = {2016.06.02},
url1 = {http://ncr.mae.ufl.edu/papers/tac07_3.pdf},
}
@InProceedings{McIntyre2005a,
Title = {Passive Coordination of Nonlinear Bilateral Teleoperated Manipulators},
Author = {M. McIntyre and W. E. Dixon and D. Dawson and E. Tatlicioglu},
Booktitle = {Proc. IEEE/ASME Int. Conf. Adv. Intell. Mechatron.},
Year = {2005},
Address = {Monterey, CA},
Month = {Jul.},
Pages = {1287-1292},
Keywords = {Robotpub}
}
@Article{McIntyre2006,
Title = {Passive Coordination of Bilateral Teleoperated Manipulators},
Author = {M. McIntyre and W. E. Dixon and D. M. Dawson and and E. Tatlicioglu},
Journal = {Robotica},
Year = {2006},
Pages = {463-476},
Volume = {24},
Keywords = {Robotpub},
Url = {http://ncr.mae.ufl.edu/papers/robo06.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/robo06.pdf}
}
@Article{McIntyre2005,
author = {M. McIntyre and W. E. Dixon and D. M. Dawson and I. D. Walker},
journal = {IEEE Trans. Robot.},
title = {Fault Detection and Identification for Robot Manipulators},
year = {2005},
pages = {1028-1034},
volume = {21},
keywords = {robotpub, fault},
url = {http://ncr.mae.ufl.edu/papers/tro05.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/tro05.pdf},
}
@InProceedings{McIntyre2004,
author = {M. McIntyre and W. E. Dixon and D. M. Dawson and I. D. Walker},
booktitle = {Proc. IEEE Int. Conf. Robot. Autom.},
title = {Fault Detection and Identification for Robot Manipulators},
year = {2004},
address = {New Orleans, Louisiana},
month = {Apr.},
pages = {4981-4986},
keywords = {robotpub, fault},
}
@InProceedings{McIntyre2005b,
Title = {Adaptive Tracking Control of On-Line Path Planners: Velocity Fields and Navigation Functions},
Author = {M. McIntyre and W. E. Dixon and D. M. Dawson and B. Xian},
Booktitle = {Proc. Am. Control Conf.},
Year = {2005},
Address = {Portland, Oregon},
Month = {Jun.},
Pages = {3168-3173},
Keywords = {Robotpub}
}
@PhdThesis{Mehta2010a,
Title = {A Daisy-Chaining Approach For Vision-Based Control And Estimation},
Author = {S. Mehta},
School = {University of Florida},
Year = {2010},
Keywords = {vision estimation},
Owner = {wdixon},
Timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/mehta_s.pdf},
}
@InProceedings{Mehta2009,
Title = {A Novel Algorithm for Refinement of Vision-based Two-View Pose Estimates},
Author = {S. Mehta and P. Barooah and S. Susca and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2009},
Address = {Shanghai, China},
Month = {Jan.},
Pages = {8452-8457},
Keywords = {Vision Estimation}
}
@InProceedings{Mehta2005,
Title = {Lyapunov-Based Teach By Zooming Visual Servo Control for an Uncalibrated Camera System},
Author = {S. Mehta and W. E. Dixon and T. Burks and S. Gupta},
Booktitle = {Proc. AIAA Guid. Navig. Control Conf.},
Year = {2005},
Address = {San Francisco, CA},
Month = {Aug.}
}
@InProceedings{Mehta2006b,
Title = {Visual Servo Control of an Unmanned Ground Vehicle via a Moving Airborne Monocular Camera},
Author = {S. Mehta and W. E. Dixon and D. MacArthur and C. D. Crane},
Booktitle = {Proc. Am. Control Conf.},
Year = {2006},
Address = {Minneapolis, Minnesota},
Month = {Jun.},
Pages = {5276-5281},
Keywords = {Vision Control}
}
@InBook{Mehta2010,
author = {S. Mehta and G. Hu and N. Gans and W. E. Dixon},
chapter = {A Daisy-Chaining Visual Servoing Approach with Applications in Tracking, Localization, and Mapping},
editor = {Hanafiah Yussof},
pages = {383-408},
publisher = {InTech},
title = {Robot Localization and Map Building},
year = {2010},
issn = {9789537619831},
keywords = {Guoqiang, vision, robotpub},
timestamp = {2016.06.02},
url = {http://ncr.mae.ufl.edu/papers/sid-chap.pdf},
}
@InProceedings{Mehta2006,
Title = {Adaptive Vision-Based Collaborative Tracking Control of an {UGV} via a Moving Airborne Camera: A Daisy Chaining Approach},
Author = {S. Mehta and G. Hu and N. Gans and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2006},
Address = {San Diego, California},
Month = {Dec.},
Pages = {3867-3872},
Keywords = {Vision Control, Guoqiang},
Timestamp = {2016.06.02}
}
@InProceedings{Mehta2006a,
Title = {Homography-Based Coordinate Relationships for Unmanned Air Vehicle Regulation},
Author = {S. Mehta and K. Kaiser and N. Gans and W. E. Dixon},
Booktitle = {Proc. AIAA Guid. Navig. Control Conf.},
Year = {2006},
Address = {Keystone, Colorado}
}
@Article{Mehta2008,
author = {S. S. Mehta and T. Burks and W. E. Dixon},
journal = {Computers Electron. Agric.},
title = {A Theoretical Model for Vision-Based Localization of a Wheeled Mobile Robot in Greenhouse Applications: A Daisy Chaining Approach},
year = {2008},
pages = {28-37},
volume = {63},
keywords = {robotpub, WMR},
url1 = {http://ncr.mae.ufl.edu/papers/ag08.pdf},
}
@InProceedings{Mehta2008a,
author = {S. S. Mehta and G. Hu and A. P. Dani and W. E. Dixon},
booktitle = {Proc. AIAA Guid. Navig. Control Conf.},
title = {Multi-Reference Visual Servo Control of an Unmanned Ground Vehicle},
year = {2008},
address = {Honolulu, Hawaii},
month = {Aug.},
keywords = {robotpub, Visual Control, Guoqiang},
timestamp = {2016.06.02},
}
@Article{MehtaT.A.,
author = {S. S. Mehta and V. Jayaraman and T. F. Burks and W. E. Dixon},
journal = {Mechatron.},
title = {Teach by Zooming: A Unified Approach to Visual Servo Control},
year = {2012},
month = {Special Issue on Visual Servoing},
number = {4},
pages = {436-443},
volume = {22},
keywords = {robotpub, Vision Control},
url1 = {http://ncr.mae.ufl.edu/papers/mech12_3.pdf},
}
@InProceedings{Mehta.Pasiliao.ea2012,
author = {S. S. Mehta and E. L. Pasiliao and J. W. Curtis and P. Barooah and W. E. Dixon},
booktitle = {Conf. Comput. Robot Vis.},
title = {{PEGUS}: An Image-Based Robust Pose Estimation Method},
year = {2012},
pages = {78-85},
keywords = {robotpub, Vision Control},
owner = {wdixon},
timestamp = {2018.01.16},
}
@MastersThesis{Merad2014,
author = {M Merad},
school = {University of Florida},
title = {Isometric Torque Control in Neuromuscular Electrical Stimulation with Fatigue-Induced Delay},
year = {2014},
keywords = {NMES, delay},
owner = {wdixon},
timestamp = {2014.09.02},
}
@Article{Merad.Downey.ea2016,
Title = {Isometric Torque Control for Neuromuscular Electrical Stimulation with Time-Varying Input Delay},
Author = {M. Merad and R. J. Downey and S. Obuz and W. E. Dixon},
Journal = {IEEE Trans. Control Syst. Tech.},
Year = {2016},
Number = {3},
Pages = {971-978},
Volume = {24},
Keywords = {Delay, NMES},
Owner = {wdixon},
Timestamp = {2016.05.04},
Url1 = {http://ncr.mae.ufl.edu/papers/cst16.pdf}
}
@Article{Navaravong.Kan.ea2012,
author = {L. Navaravong and Z. Kan and J. M. Shea and W. E. Dixon},
journal = {IEEE Netw.},
title = {Formation Reconfiguration for Mobile Robots with Network Connectivity Constraints},
year = {2012},
number = {4},
pages = {18-24},
volume = {26},
keywords = {robotpub, Networkpub},
owner = {wdixon},
timestamp = {2012.07.30},
url1 = {http://ncr.mae.ufl.edu/papers/Net12.pdf},
}
@InProceedings{Navaravong2011,
author = {L. Navaravong and J. M. Shea and W. E. Dixon},
booktitle = {Proc. Military Commun. Conf.},
title = {Physical- and Network-Topology Control for Systems of Mobile Robots},
year = {2011},
address = {Baltimore, MD},
month = {Nov.},
pages = {1079--1084},
keywords = {robotpub, networkpub},
}
@InProceedings{Navaravong12a,
author = {L. Navaravong and J. M. Shea and Eduardo L. Pasiliao Jr and W. E. Dixon},
booktitle = {Proc. IEEE Communications Conf.},
title = {Optimizing Network Topology To Reduce Aggregate Traffic in A System of Mobile Robots under An Energy Constraint},
year = {2012},
address = {Ottawa, Canada},
month = {Jun.},
pages = {16-20},
keywords = {robotpub, Networkpub, Optimal},
}
@InBook{Navaravong.Shea.ea2013,
author = {L. Navaravong and J. M. Shea and E. L. Pasiliao and G. Barnette and W. E. Dixon},
chapter = {Optimizing Network Topology to Reduce Aggregate Traffic in Systems of Mobile Agents},
editor = {B. Goldengorin and V. A. Kalyagin and P. M. Pardalos},
pages = {129-149},
publisher = {Springer New York},
title = {Models, Algorithms, and Technologies for Network Analysis},
year = {2013},
series = {Springer Proceedings in Mathematics \& Statistics},
volume = {32},
doi = {10.1007/978-1-4614-5574-5_8},
keywords = {RISE, robotpub, Networkpub, Optimal, delay, NN, theory},
owner = {wdixon},
timestamp = {2013.01.03},
url = {http://dx.doi.org/10.1007/978-1-4614-5574-5_8},
}
@InProceedings{Navaravong.Shea.ea2013a,
author = {L. Navaravong and J. M. Shea and E. L. Pasiliao and W. E. Dixon},
booktitle = {Proc. Military Commun. Conf.},
title = {Graph Matching-Based Topology Reconfiguration Algorithm for Systems of Networked Autonomous Vehicles},
year = {2013},
address = {San Diego, USA},
month = {Nov.},
keywords = {robotpub, networkpub},
}
@Article{Noakes2004,
Title = {Ergonomic interface concepts for minimally invasive, remote, and virtual surgical systems},
Author = {M. W. Noakes and W. E. Dixon},
Journal = {Stud. Health Tech. Info.},
Year = {2004},
Pages = {275-277},
Volume = {98},
Keywords = {robotpub}
}
@InProceedings{Noakes2004a,
Title = {Ergonomic Interface Concepts for Minimally Invasive, Remote, and Virtual Surgical Systems},
Author = {M. W. Noakes and W. E. Dixon},
Booktitle = {Medicine Meets Virtual Reality Conference},
Year = {2004},
Address = {Newport Beach, California},
Month = {Jan.},
Pages = {275-277},
Keywords = {robotpub}
}
@PhdThesis{Obuz2016,
Title = {Unknown Time-Varying Input Delay Compensation For Uncertain Nonlinear Systems},
Author = {S. Obuz},
School = {University of Florida},
Year = {2016},
Keywords = {delay, theory, NMES},
Timestamp = {2017.05.17},
Url1 = {http://ncr.mae.ufl.edu/dissertations/obuz.pdf}
}
@InProceedings{Obuz.Downey.ea2015,
Title = {Unknown Time-Varying Input Delay Compensation for Neuromuscular Electrical Stimulation},
Author = {S. Obuz and R. J. Downey and J. R. Klotz and W. E. Dixon},
Booktitle = {IEEE Multi-Conf. Syst. and Control},
Year = {2015},
Address = {Sydney, Australia},
Month = {Sep.},
Pages = {365-370},
Keywords = {delay, NMES},
Timestamp = {2016.06.30}
}
@InProceedings{Obuz.Downey.ea2016,
author = {S. Obuz and R. J. Downey and A. Parikh and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Compensating for Uncertain Time-varying Delayed Muscle Response in Isometric Neuromuscular Electrical Stimulation Control},
year = {2016},
pages = {4368-4372},
keywords = {NMES, delay},
timestamp = {2016.07.11},
}
@Article{Obuz.Duenas.2020,
Title = {Closed-loop Neuromuscular Electrical Stimulation Method Provides Robustness to Unknown Time-Varying Input Delay in Muscle Dynamics},
Author = {S. Obuz and V. H. Duenas and R. J. Downey and J. R. Klotz and W. E. Dixon},
Journal = {IEEE Trans. Control Syst. Tech.},
Year = {2020},
Month = {November},
Pages = {2482-2489},
Volume = {28},
Number = {6},
Keywords = {NMES},
Url1 = {http://ncr.mae.ufl.edu/papers/cst20.pdf}
}
@Article{Obuz.Klotz.ea2017,
Title = {Unknown Time-Varying Input Delay Compensation for Uncertain Nonlinear Systems},
Author = {S. Obuz and J. R. Klotz and R. Kamalapurkar and W. E. Dixon},
Journal = {Automatica},
Year = {2017},
Month = {February},
Pages = {222-229},
Volume = {76},
Keywords = {delay, theory},
Owner = {wdixon},
Timestamp = {2016.06.28},
Url1 = {http://ncr.mae.ufl.edu/papers/auto17.pdf}
}
@InProceedings{Obuz.Parikh.ea2016,
Title = {Lyapunov-Based Control of an Uncertain Euler-Lagrange System with Uncertain Time-Varying Input Delays without Delay Rate Constraints},
Author = {S. Obuz and A. Parikh and I. Chakraborty and W. E. Dixon},
Booktitle = {IFAC Workshop on Time Delay Systems},
Year = {2016},
Keywords = {delay},
Owner = {wdixon},
Timestamp = {2016.05.04}
}
@PhdThesis{Parikh2016,
Title = {A Switched Systems Approach to Image-based Estimation},
Author = {A. Parikh},
School = {University of Florida},
Year = {2016},
Keywords = {vision estimation, theory, UAV, switched},
Owner = {wdixon},
Timestamp = {2016.07.25},
url1 = {http://ncr.mae.ufl.edu/dissertations/AnupP.pdf},
}
@Article{Parikh.Cheng.ea2017,
Title = {A Switched Systems Framework for Guaranteed Convergence of Image-Based Observers with Intermittent Measurements},
Author = {A. Parikh and T.-H. Cheng and H.-Y. Chen and W. E. Dixon},
Journal = {IEEE Trans. Robot.},
Year = {2017},
Month = {April},
Number = {2},
Pages = {266-280},
Volume = {33},
Keywords = {vision estimation, switched, robotpub},
Owner = {wdixon},
Timestamp = {2017.04.05},
Url1 = {http://ncr.mae.ufl.edu/papers/TRO17.pdf}
}
@InProceedings{Parikh.Cheng.ea2015,
Title = {A Switched Systems Approach to Vision-Based Localization of a Target with Intermittent Measurements},
Author = {Anup Parikh and Teng-Hu Cheng and Warren E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2015},
Month = {Jul.},
Pages = {4443-4448},
Keywords = {vision estimation, switched},
Owner = {wdixon},
Timestamp = {2015.02.09}
}
@InProceedings{Parikh.Cheng.ea2014,
Title = {A Switched Systems Approach to Image-Based Localization of Targets that Temporarily Leave the Field of View},
Author = {A. Parikh and T.-Hu Cheng and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2014},
Pages = {2185-2190},
Keywords = {Vision Estimation, switched},
Owner = {anuppari},
Timestamp = {2014.07.09}
}
@Article{Parikh.Cheng.ea2018,
Title = {A Switched Systems Approach to Image-Based Localization of Targets that Temporarily Leave the Camera Field of View},
Author = {A. Parikh and T.-H. Cheng and R. Licitra and W. E. Dixon},
Journal = {IEEE Trans. Control Syst. Technol.},
Year = {2018},
Number = {6},
Pages = {2149-2156},
Volume = {26},
Keywords = {Vision Estimation, Vision Control},
Owner = {wdixon},
Timestamp = {2017.09.13},
Url1 = {http://ncr.mae.ufl.edu/papers/cst18.pdf}
}
@InProceedings{Parikh.Kamalapurkar.ea2015,
Title = {Homography Based Visual Servo Control with Scene Reconstruction},
Author = {Anup Parikh and Rushikesh Kamalapurkar and Hsi-Yuan Chen and Warren E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2015},
Pages = {6972-6977},
Keywords = {Vision Estimation, Vision Control},
Timestamp = {2014.07.09}
}
@Article{Parikh.Kamalapurkar.ea2019,
Title = {Integral Concurrent Learning: Adaptive Control with Parameter Convergence using Finite Excitation},
Author = {A. Parikh and R. Kamalapurkar and W. E. Dixon},
Journal = {Int J Adapt Control Signal Process},
Year = {2019},
Month = dec,
Number = {12},
Pages = {1775-1787},
Volume = {33},
Keywords = {theory, learning, concurrent learning, adaptive control},
Url1 = {http://ncr.mae.ufl.edu/papers/IJACSP192.pdf}
}
@Article{Parikh.Kamalapurkar.ea2018,
Title = {Target Tracking in the Presence of Intermittent Measurements via Motion Model Learning},
Author = {A. Parikh and R. Kamalapurkar and W. E. Dixon},
Journal = {IEEE Trans. Robot.},
Year = {2018},
Number = {3},
Pages = {805-819},
Volume = {34},
Keywords = {vision estimation, switched, robotpub},
Owner = {wdixon},
Timestamp = {2018.02.19},
Url1 = {http://ncr.mae.ufl.edu/papers/TRO18b.pdf}
}
@InBook{Parikh.Kamalapurkar.ea2016,
Title = {Adaptive Control for Robotic Manipulators},
Author = {A. Parikh and R. Kamalapurkar and W. E. Dixon},
Chapter = {Data-Based Learning for Uncertain Robotic Systems},
Editor = {D. Zhang and B. Wei},
Pages = {40-48},
Publisher = {Taylor \& Francis Group},
Year = {2016},
Keywords = {Learning, robotpub},
Owner = {wdixon},
Timestamp = {2017.04.05},
Url1 = {http://ncr.mae.ufl.edu/papers/bookchap17.pdf}
}
@PhdThesis{Patre2009b,
Title = {Lyapunov-Based Robust And Adaptive Control Of Nonlinear Systems Using A Novel Feedback Structure},
Author = {P. Patre},
School = {University of Florida},
Year = {2009},
Owner = {wdixon},
Timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/patre.pdf},
}
@InProceedings{Patre2009,
author = {P. Patre and S. Bhasin and Z. Wilcox and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Composite Adaptation for Neural Network-Based Controllers},
year = {2009},
address = {Shanghai, China},
month = {Jan.},
pages = {6726-6731},
keywords = {RISE, NN, theory},
}
@Article{Patre2010a,
author = {P. Patre and S. Bhasin and Z. D. Wilcox and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Composite Adaptation for Neural Network-Based Controllers},
year = {2010},
number = {4},
pages = {944-950},
volume = {55},
keywords = {RISE, NN, theory},
url1 = {http://ncr.mae.ufl.edu/papers/tac10.pdf},
}
@InProceedings{Patre2007,
author = {P. Patre and W. E. Dixon and K. Kaiser and W. Mackunis},
booktitle = {Proc. Am. Control Conf.},
title = {Asymptotic Tracking for Uncertain Dynamic Systems via a Multilayer {NN} Feedforward and {RISE} Feedback Control Structure},
year = {2007},
address = {New York, NY},
month = {Jul.},
pages = {5989-5994},
keywords = {RISE, NN, theory},
}
@Article{Patre2011,
author = {P. Patre and W. Mackunis and K. Dupree and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Modular Adaptive Control of Uncertain {E}uler-{L}agrange Systems with Additive Disturbances},
year = {2011},
number = {1},
pages = {155-160},
volume = {56},
keywords = {RISE, NN, theory},
url1 = {http://ncr.mae.ufl.edu/papers/tac11.pdf},
}
@Article{Patre2010b,
author = {P. Patre and W. Mackunis and M. Johnson and W. E. Dixon},
journal = {Automatica},
title = {Composite Adaptive Control for {E}uler-{L}agrange Systems with Additive Disturbances},
year = {2010},
number = {1},
pages = {140-147},
volume = {46},
keywords = {RISE, NN, theory},
url1 = {http://ncr.mae.ufl.edu/papers/auto10.pdf},
}
@InProceedings{Patre2006,
Title = {Asymptotic Tracking for Systems with Structured and Unstructured Uncertainties},
Author = {P. M. Patre and W. E. Dixon and C. Makkar and W. Mackunis},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2006},
Address = {San Diego, California},
Month = {Dec.},
Pages = {441-446},
Keywords = {RISE, theory}
}
@InProceedings{Patre2008c,
author = {P. M. Patre and K. Dupree and W. MacKunis and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {A New Class of Modular Adaptive Controllers, Part II: Neural Network Extension for Non-LP Systems},
year = {2008},
address = {Seattle, WA, USA},
month = {Jun.},
pages = {1214-1219},
keywords = {RISE, NN, theory},
}
@Book{Patre2010c,
Title = {{RISE}-Based Robust and Adaptive Control of Nonlinear Systems},
Author = {P. M. Patre and W. MacKunis and K. Dupree and W. E. Dixon},
Publisher = {Birkhauser: Boston},
Year = {to appear},
Timestamp = {2016.09.28}
}
@InProceedings{Patre2008b,
author = {P. M. Patre and W. MacKunis and K. Dupree and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {A New Class of Modular Adaptive Controllers, Part I: Systems with Linear-in-the-Parameters Uncertainty},
year = {2008},
address = {Seattle, WA, USA},
month = {Jun.},
pages = {1208-1213},
keywords = {RISE, NN, theory},
}
@InProceedings{Patre2009a,
Title = {Composite Adaptive Control for Systems with Additive Disturbances},
Author = {P. M. Patre and W. MacKunis and M. Johnson and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2009},
Address = {St. Louis, Missouri},
Month = {Jun.},
Pages = {1928-1933},
Keywords = {RISE, theory}
}
@Article{Patre2008,
author = {P. M. Patre and W. MacKunis and K. Kaiser and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Asymptotic Tracking for Uncertain Dynamic Systems via a Multilayer Neural Network Feedforward and {RISE} Feedback Control Structure},
year = {2008},
number = {9},
pages = {2180-2185},
volume = {53},
keywords = {RISE, NN, theory},
url1 = {http://ncr.mae.ufl.edu/papers/TAC08_2.pdf},
}
@Article{Patre2008a,
Title = {Asymptotic Tracking for Systems with Structured and Unstructured Uncertainties},
Author = {P. M. Patre and W. Mackunis and C. Makkar and W. E. Dixon},
Journal = {IEEE Trans. Control Syst. Technol.},
Year = {2008},
Pages = {373-379},
Volume = {16},
Keywords = {RISE, theory},
Url1 = {http://ncr.mae.ufl.edu/papers/cst08.pdf}
}
@InProceedings{Pazderski2004,
Title = {Tracking and Regulation Control of a Skid-Steering Vehicle},
Author = {D. Pazderski and K. Kozlowski and W. E. Dixon},
Booktitle = {ANS Int. Conf. Robot. Remote Syst. for Hazard. Environ.},
Year = {2004},
Address = {Gainesville, Florida},
Month = {Mar.},
Pages = {369-376},
Keywords = {Robotpub}
}
@Article{Queiroz2000,
Title = {Comments on Redesign of Hybrid Adaptive/Robust Motion Control of Rigid-Link Electrically-Driven Robot Manipulators},
Author = {M. S. de Queiroz and F. Zhang and W. E. Dixon},
Journal = {IEEE Trans. Robot. Autom.},
Year = {2000},
Pages = {448-449},
Volume = {16},
Keywords = {Robotpub},
Url = {http://ncr.mae.ufl.edu/papers/tra002.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/tra002.pdf}
}
@Article{RianoRios.Bevilacqua.ea2021,
author = {C. Riano-Rios and R. Bevilacqua and W. E. Dixon},
journal = {Acta Astronautica},
title = {Adaptive Control For Differential Drag-Based Rendezvous Maneuvers with an Unknown Target},
year = {2021},
month = apr,
pages = {733-740},
volume = {181},
keywords = {RT2, aeropub},
Url1 = {http://ncr.mae.ufl.edu/papers/astro21.pdf}
}
@InProceedings{RianoRios.Bevilacqua.ea2019,
Title = {Relative Maneuvering for Multiple Spacecraft via Differential Drag using LQR and Constrained Least Squares},
Author = {C. Riano-Rios and R. Bevilacqua and W. E. Dixon},
Booktitle = {AAS/AIAA Space Flight Mechanics Meeting},
Year = {2019},
Keywords = {aeropub}
}
@InProceedings{RianoRios.Omar.ea2020,
Title = {Spacecraft Attitude Regulation in Low Earth Orbit Using Natural Torques},
Author = {C. Riano-Rios and S. Omar and R. Bevilacqua and W. E. Dixon},
Booktitle = {Proc. Colombian Conf. on Autom. Control},
Year = {2019},
Keywords = {aeropub}
}
@Article{Rosenfeld.Kamalapurkar.ea2019,
Title = {The State Following (StaF) Approximation Method},
Author = {J. A. Rosenfeld and R. Kamalapurkar and W. E. Dixon},
Journal = {IEEE Trans. on Neural Netw. Learn. Syst.},
Year = {2019},
Month = {June},
Number = {6},
Pages = {1716-1730},
Volume = {30},
Keywords = {theory},
Url1 = {http://ncr.mae.ufl.edu/papers/tnnls19.pdf}
}
@InProceedings{Rosenfeld.Kamalapurkar.ea2015,
Title = {State Following ({S}ta{F}) Kernel Functions for Function Approximation {P}art {I}: Theory and Motivation},
Author = {Joel A. Rosenfeld and Rushikesh Kamalapurkar and Warren E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2015},
Pages = {1217-1222},
Keywords = {Optimal, learning, theory},
Owner = {wdixon},
Timestamp = {2015.02.09}
}
@Article{Rosenfeld.Rosenfeld.ea2019,
Title = {A Mesh-free Pseudospectral Approach to Estimating the Fractional Laplacian via Radial Basis Functions},
Author = {J. A. Rosenfeld and S. A. Rosenfeld and W. E. Dixon},
Journal = {J. Comput. Phys.},
Year = {2019},
Pages = {306-322},
Volume = {390},
Keywords = {theory},
Url1 = {http://ncr.mae.ufl.edu/papers/jcp19.pdf}
}
@Article{Rosenfeld.Russo.ea2018,
Title = {The Mittag Leffler Reproducing Kernel Hilbert Spaces of Entire and Analytic Functions},
Author = {J. A. Rosenfeld and B. Russo and W. E. Dixon},
Journal = {J. Math. Anal. Appl.},
Year = {2018},
Month = {July},
Number = {2},
Pages = {576-592},
Volume = {463},
Keywords = {theory},
Owner = {wdixon},
Timestamp = {2018.05.15},
Url1 = {http://ncr.mae.ufl.edu/papers/JMAA18.pdf}
}
@Article{Rosenfeld.Dixon2017,
Title = {Approximating the Caputo Fractional Derivative through the Mittag-Leffler Reproducing Kernel Hilbert Space and the Kernelized Adams-Bashforth-Moulton Method},
Author = {J. Rosenfeld and W. E. Dixon},
Journal = {SIAM J. Numer. Anal.},
Year = {2017},
Number = {3},
Pages = {1201-1217},
Volume = {53},
Keywords = {Fractional Order, RKHS, theory},
Owner = {wdixon},
Timestamp = {2017.05.26},
Url1 = {http://ncr.mae.ufl.edu/papers/SIAM17.pdf}
}
@PhdThesis{Rouse2019,
Title = {A Switched Systems Approach To Human-Machine Interaction},
Author = {C Rouse},
School = {University of Florida},
Year = {2019},
Keywords = {FES, NMES, robotpub},
Url1 = {http://ncr.mae.ufl.edu/dissertations/rouse2019.pdf}
}
@InProceedings{Rouse.Cousin.ea2018b,
author = {C. Rouse and C. A. Cousin and V. Duenas and W. E. Dixon},
booktitle = {Proc. IFAC Conf. Cyber. Phys. Hum. Syst.},
title = {{FES} and Motor Assisted Cycling to Track Power and Cadence to Desired Voluntary Bounds},
year = {2018},
pages = {34-39},
keywords = {FES, NMES},
}
@InProceedings{Rouse.Cousin.ea2019,
author = {C. Rouse and C. Cousin and B. C. Allen and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Split-Crank Cadence Tracking for Switched Motorized {FES}-Cycling with Volitional Pedaling},
year = {2019},
pages = {4393-4398},
keywords = {FES, NMES, BrendonAllenPub},
}
@InProceedings{Rouse.Cousin.ea2018,
Title = {Cadence Tracking for Switched {FES} Cycling Combined with Voluntary Pedaling and Motor Resistance},
Author = {C. Rouse and C. Cousin and V. H. Duenas and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2018},
Pages = {4558-4563},
Keywords = {NMES, robotpub},
Owner = {wdixon},
Timestamp = {2018.01.22}
}
@InProceedings{Rouse.Cousin.ea2018a,
Title = {Varying Motor Assistance During Biceps Curls Induced Via Functional Electrical Stimulation},
Author = {C. Rouse and C. Cousin and V. H. Duenas and W. E. Dixon},
Booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
Year = {2018},
Keywords = {NMES, switched},
Owner = {wdixon},
Timestamp = {2018.06.05}
}
@InProceedings{Rouse.Duenas.ea2017,
Title = {Switched Motorized Assistance during Switched Functional Electrical Stimulation of the Biceps Brachii to Compensate for Fatigue},
Author = {C. Rouse and C. Cousin and V. H. Duenas and W. E. Dixon},
Booktitle = {IEEE Conf. Dec. Control},
Year = {2017},
Pages = {5912-5918},
Keywords = {NMES, robotpub},
Owner = {wdixon},
Timestamp = {2018.01.11}
}
@Article{Rouse.Downey.ea2020,
author = {C. Rouse and R. Downey and C. Gregory and C. Cousin and V. Duenas and W. E. Dixon},
journal = {IEEE Trans. Biomed. Eng.},
title = {{FES} Cycling in Stroke: Novel Closed-Loop Algorithm Accommodates Differences in Functional Impairments},
year = {2020},
number = {3},
pages = {738-749},
volume = {67},
keywords = {FES, NMES, robotpub},
url1 = {http://ncr.mae.ufl.edu/papers/tbio20.pdf},
}
@Article{Rouse.Duenas.ea2018,
Title = {A Switched Systems Approach Based on Changing Muscle Geometry of the Biceps Brachii During Functional Electrical Stimulation},
Author = {C. Rouse and V. H Duenas and C.Cousin and A. Parikh and W. E. Dixon},
Journal = {IEEE Control Syst. Lett.},
Year = {2018},
Number = {1},
Pages = {73-78},
Volume = {2},
Keywords = {NMES, switched},
Owner = {wdixon},
Timestamp = {2017.10.09},
Url1 = {http://ncr.mae.ufl.edu/papers/CSL18.pdf}
}
@InProceedings{Rouse.Parikh.ea2016,
Title = {Compensating for Changing Muscle Geometry of the Biceps Brachii During Neuromuscular Electrical Stimulation: A Switched Systems Approach},
Author = {C. Rouse and A. Parikh and V. Duenas and C. Cousin and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2016},
Pages = {1328-1333},
Keywords = {NMES, robotpub},
Owner = {wdixon},
Timestamp = {2017.05.10}
}
@Article{Sargolzaei.Crane.ea2020,
Title = {Detection and Mitigation of False Data Injection Attacks in Networked Control Systems},
Author = {A. Sargolzaei and C. D. Crane and K. Yazdani and A. Abbaspour and W. E. Dixon},
Journal = {IEEE Trans. on Ind. Inform.},
Year = {2020},
Month = jun,
Number = {6},
Pages = {4281-4292},
Volume = {16},
Keywords = {theory, networkpub},
Url1 = {http://ncr.mae.ufl.edu/papers/tie20.pdf}
}
@InProceedings{Setlur2001,
author = {P. Setlur and A. Behal and W. E. Dixon and D. M. Dawson},
booktitle = {Proc. Int. Symp. Adapt. Intell. Syst. Control},
title = {Adaptive Position and Orientation Regulation for the Camera-in-Hand Problem},
year = {2001},
address = {Charlottesville, VA},
month = {Jun.},
keywords = {robotpub, Vision Estimation},
}
@PhdThesis{Sharma2010a,
Title = {Lyapunov-Based Control Methods For Neuromuscular Electrical Stimulation},
Author = {N. Sharma},
School = {University of Florida},
Year = {2010},
Keywords = {NMES, theory, delay},
Owner = {wdixon},
Timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/sharma.pdf},
}
@Article{Sharma2012,
author = {N. Sharma and S. Bhasin and Q. Wang and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {{RISE}-Based Adaptive Control of a Control Affine Uncertain Nonlinear System with Unknown State Delays},
year = {2012},
month = {Jan.},
number = {1},
pages = {255-259},
volume = {57},
keywords = {RISE, delay, theory},
url1 = {http://ncr.mae.ufl.edu/papers/tac12_2.pdf},
}
@Article{Sharma2011,
author = {N. Sharma and S. Bhasin and Q. Wang and W. E. Dixon},
journal = {Automatica},
title = {Predictor-Based Control for an Uncertain {E}uler-{L}agrange System with Input Delay},
year = {2011},
number = {11},
pages = {2332-2342},
volume = {47},
keywords = {theory, delay},
url1 = {http://ncr.mae.ufl.edu/papers/auto11_2.pdf},
}
@InProceedings{Sharma2010,
author = {N. Sharma and S. Bhasin and Q. Wang and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Predictor-Based Control for an Uncertain {E}uler-{L}agrange System with Input Delay},
year = {2010},
pages = {1422-1427},
keywords = {theory, delay},
}
@Article{Sharma2011b,
author = {N. Sharma and C. Gregory and W. E. Dixon},
journal = {IEEE Trans. Neural Syst. Rehabil. Eng.},
title = {Predictor-based Compensation for Electromechanical Delay During Neuromuscular Electrical Stimulation},
year = {2011},
number = {6},
pages = {601-611},
volume = {19},
keywords = {NMES, delay},
url1 = {http://ncr.mae.ufl.edu/papers/tnsre11.pdf},
}
@Article{SharmaT.A.c,
author = {N. Sharma and C. Gregory and M. Johnson and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Tech.},
title = {Closed-Loop Neural Network-based {NMES} Control for Human Limb Tracking},
year = {2012},
number = {3},
pages = {712-725},
volume = {20},
keywords = {NMES, NN},
url1 = {http://ncr.mae.ufl.edu/papers/cst12.pdf},
}
@InProceedings{Sharma2008,
author = {N. Sharma and C. M. Gregory and M. Johnson and W. E. Dixon},
booktitle = {Proc. IEEE Int. Symp. Intell. Control},
title = {Modified Neural Network-based Electrical Stimulation for Human Limb Tracking},
year = {2008},
address = {San Antonio, Texas},
month = {Sep.},
pages = {1320-1325},
keywords = {NMES, NN},
}
@Article{Sharma.Kirsch.ea2017,
Title = {A Nonlinear Control Method to Compensate for Muscle Fatigue During Neuromuscular Electrical Stimulation},
Author = {N. Sharma and N. A. Kirsch and N. A. Alibeji and W. E. Dixon},
Journal = {Front. Robot. AI},
Year = {2017},
Month = {Dcember},
Pages = {68},
Volume = {4},
Keywords = {NMES},
Owner = {wdixon},
Timestamp = {2018.01.10},
Url1 = {http://ncr.mae.ufl.edu/papers/front17.pdf}
}
@InProceedings{Sharma2009b,
Title = {Nonlinear Control of {NMES}: Incorporating Fatigue and Calcium Dynamics},
Author = {N. Sharma and P. Patre and C. Gregory and W. E. Dixon},
Booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
Year = {2009},
Address = {Hollywood, CA},
Month = {Oct.},
Pages = {705-712}
}
@Article{Sharma2009,
author = {N. Sharma and K. Stegath and C. M. Gregory and W. E. Dixon},
journal = {IEEE Trans. Neural Syst. Rehabil. Eng.},
title = {Nonlinear Neuromuscular Electrical Stimulation Tracking Control of a Human Limb},
year = {2009},
month = {Jun.},
number = {6},
pages = {576-584},
volume = {17},
keywords = {RISE, NMES},
url1 = {http://ncr.mae.ufl.edu/papers/TNSRE09.pdf},
}
@Article{Shin.Kim.ea2012,
author = {J. Shin and H.J. Kim and Y. Kim and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Technol.},
title = {Autonomous Flight of the Rotorcraft-based {UAV} Using {RISE} Feedback and {NN} Feedforward Terms},
year = {2012},
number = {5},
pages = {1392-1399},
volume = {20},
keywords = {RISE, NN, UAV, robotpub, aeropub},
url1 = {http://ncr.mae.ufl.edu/papers/cst12_2.pdf},
}
@InProceedings{Shin2010,
author = {J. Shin and H. Jin Kim and Y. Kim and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Asymptotic attitude tracking of the rotorcraft-based {UAV} via {RISE} feedback and {NN} feedforward},
year = {2010},
address = {Atlanta, GA},
pages = {3694-3699},
keywords = {RISE, NN, UAV, robotpub, aeropub},
}
@InProceedings{Solanki2006,
author = {S. C. Solanki and W. E. Dixon and C. D. Crane and S. Gupta},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Uncalibrated Visual Servo Control of Robot Manipulators with Uncertain Kinematics},
year = {2006},
address = {San Diego, California},
month = {Dec.},
pages = {3855-3860},
keywords = {robotpub, Vision Control},
}
@InProceedings{Stegath2007,
author = {K. Stegath and N. Sharma and C.M. Gregory and W. E. Dixon},
booktitle = {Proc. IEEE Int. Conf. Syst. Man Cybern.},
title = {An Extremum Seeking Method for Non-isometric Neuromuscular Electrical Stimulation},
year = {2007},
address = {Montr\'{e}al, Canada},
month = {Oct.},
pages = {2528-2532},
keywords = {Optimal, NMES, delay, theory},
timestamp = {2017-07-06},
}
@InProceedings{Stegath2007a,
Title = {Experimental Demonstration of {RISE}-Based NMES of Human Quadriceps Muscle},
Author = {K. Stegath and N. Sharma and C.M. Gregory and W. E. Dixon},
Booktitle = {IEEE-NIH Life Sci. Syst. Appl.},
Year = {2007},
Address = {Bethesda, MD},
Month = {Nov.},
Pages = {43-46},
Keywords = {NMES, RISE}
}
@InProceedings{Stegath2008,
author = {K. Stegath and N. Sharma and C. M. Gregory and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Nonlinear Tracking Control of a Human Limb via Neuromuscular Electrical Stimulation},
year = {2008},
address = {Seattle, WA, USA},
month = {Jun.},
pages = {1941-1946},
keywords = {RISE, NMES, delay},
}
@PhdThesis{Subramanian2012,
author = {S. Subramanian},
school = {University of Florida},
title = {Control Techniques in Dynamic Communication Networks},
year = {2012},
keywords = {RISE, Networkpub, delay, theory},
owner = {wdixon},
timestamp = {2012.08.27},
url1 = {http://ncr.mae.ufl.edu/dissertations/sank.pdf},
}
@InProceedings{Subramanian.Curtis.ea2012,
author = {S. Subramanian and J. W. Curtis and E. L. Pasiliao and J. M. Shea and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Continuous Congestion Control for Differentiated-Services Networks},
year = {2012},
address = {Maui, HI},
month = {Dec.},
pages = {4591-4596},
keywords = {networkpub, delay},
owner = {wdixon},
timestamp = {2012.07.19},
}
@InProceedings{Subramanian.Pasiliao.ea2012,
author = {S. Subramanian and E. L. Pasiliao and J. M. Shea and M. M. Carvalho and W. E. Dixon},
booktitle = {Proc. IEEE Mil. Commun. Conf.},
title = {Throughput Maximization in {CSMA} Networks with Collisions},
year = {2012},
address = {Orlando, FL},
pages = {908-913},
keywords = {networkpub, Optimal, delay},
owner = {sankrith},
timestamp = {2012.09.17},
}
@InBook{Subramanian.Pasiliao.ea2012a,
Title = {Dynamics of Information Systems: Mathematical Foundations},
Author = {S. Subramanian and E. L. Pasiliao and J. M. Shea and J. W. Curtis and W. E. Dixon},
Chapter = {Throughput Maximization in {CSMA} Networks with Collisions and Hidden Terminals},
Editor = {A. Sorokin and R. Murphey and M. T. Thai and P. M. Pardalos},
Pages = {195-206},
Publisher = {Springer},
Year = {2012},
Keywords = {Networkpub},
Owner = {wdixon},
Timestamp = {2012.12.29}
}
@InProceedings{Subramanian2009a,
Title = {Prediction-Based Power Control for Distributed Cellular Communication Networks with Time-Varying Channel Uncertainties},
Author = {S. Subramanian and J. Shea and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2009},
Address = {Shanghai, China},
Pages = {1998-2003},
Keywords = {networkpub}
}
@InProceedings{Subramanian2009b,
author = {S. Subramanian and J.M. Shea and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Power Control for Cellular Communications with Channel Uncertainties},
year = {2009},
address = {St. Louis, Missouri},
month = {Jun.},
pages = {1569-1574},
keywords = {networkpub, Optimal},
}
@Article{Subramanian.Shea.ea2014a,
author = {S. Subramanian and J. M. Shea and W. E. Dixon},
journal = {Asian J. Control},
title = {Power Control for Cellular Communications with Time-Varying Channel Uncertainties},
year = {2014},
month = {Sept.},
number = {5},
pages = {1459-1469},
volume = {16},
keywords = {networkpub, Optimal},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/ajc14_2.pdf},
}
@InProceedings{Subramanian.Shea.ea2014,
author = {S. Subramanian and J. M. Shea and E. L. Pasiliao and M. M. Carvalho and W. E. Dixon},
booktitle = {IEEE Wirel. Commun. Netw. Conf.},
title = {Efficient Spectrum Allocation in Multiband CSMA Networks},
year = {2014},
keywords = {networkpub, Optimal, delay},
owner = {wdixon},
timestamp = {2013.12.19},
}
@Article{Subramanian2009,
Title = {Sensor Fusion Using Fuzzy Logic Enhanced Kalman Filter for Autonomous Vehicle Guidance in Citrus Groves},
Author = {V. Subramanian and T. F. Burks and W. E. Dixon},
Journal = {Trans. of the Am. Society of Agri. and Bio. Eng.},
Year = {2009},
Number = {5},
Pages = {1411-1422},
Volume = {52},
Keywords = {robotpub},
Url = {http://ncr.mae.ufl.edu/papers/ASABE09.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/ASABE09.pdf}
}
@InProceedings{Sun.Bell.ea2020,
author = {R. Sun and Z. Bell and F. Zegers and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {A Switched Systems Approach to Unknown Environment Exploration with Intermittent State Feedback for Nonholonomic Systems},
year = {2020},
Pages = {5275-5280},
keywords = {robotpub, vision estimation, Runhan},
}
@PhdThesis{Thompson2009b,
Title = {Haltere Mediated Flight Stabilization In Diptera: Rate Decoupling, Sensory Encoding, And Control Realization},
Author = {R. A. Thompson},
School = {University of Florida},
Year = {2009},
Keywords = {aeropub},
Owner = {wdixon},
Timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/tony.pdf},
}
@InProceedings{Thompson2009a,
Title = {Angular Rate Encoding in Haltere Feedback for Flight Stabilization of Dipteran Insects},
Author = {R. A. Thompson and N. Rummelt and W. E. Dixon},
Booktitle = {Proc. AIAA Guid. Navig. Control Conf.},
Year = {2009},
Address = {Chicago, IL},
Month = {Aug.},
Keywords = {aeropub},
Timestamp = {2017.05.17}
}
@InProceedings{Thompson2008,
Title = {Evaluation of the Haltere as a Biologically Inspired Inertial Rate Measurement Sensor},
Author = {R. A. Thompson and M. F. Wehling and J. Evers and W. E. Dixon},
Booktitle = {Proc. AIAA Guid. Navig. Control Conf.},
Year = {2008},
Address = {Honolulu, Hawaii},
Month = {Aug.},
Keywords = {aeropub}
}
@Article{Thompson2009,
Title = {Body Rate Decoupling Using Haltere Mid-stroke Measurements for Inertial Flight Stabilization in Diptera},
Author = {R. Thompson and M. F. Wheling and J. Evers and W. E. Dixon},
Journal = {J. Comp. Physiol. A: Neuro. Sens. Neural Behav. Physiol.},
Year = {2009},
Pages = {99-112},
Volume = {195},
Keywords = {aeropub},
Timestamp = {2017.05.17},
Url1 = {http://ncr.mae.ufl.edu/papers/jcp08.pdf}
}
@InProceedings{Vamvoudakis.Antsaklis.ea2015,
Title = {Autonomy and Machine Intelligence in Complex Systems: A Tutorial},
Author = {K. Vamvoudakis and P. J. Antsaklis and W. E. Dixon and J. P. Hespanha, F. L. Lewis, H. Modares, B. Kiumarsi},
Booktitle = {Proc. Am. Control Conf.},
Year = {2015},
Month = {Jul.},
Pages = {5062-5079},
Keywords = {Optimal, robotpub, learning},
Owner = {wdixon},
Timestamp = {2015.02.09}
}
@InProceedings{Vamvoudakis.Lewis.ea2012,
Title = {Online Learning Algorithm for Stackelberg Games in Problems with Hierarchy},
Author = {K. Vamvoudakis and F. L. Lewis and M. Johnson and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2012},
Address = {Maui, HI},
Month = {Dec.},
Pages = {1883-1889},
Keywords = {theory},
Owner = {wdixon},
Timestamp = {2012.07.19}
}
@Article{Vamvoudakis.Lewis.ea2019,
Title = {Open-Loop Stackelberg Learning Solution for Hierarchical Control Problems},
Author = {K. G. Vamvoudakis and F. L. Lewis and W. E. Dixon},
Journal = {Int J Adapt Control Signal Process},
Year = {2019},
Number = {2},
Pages = {614-627},
Volume = {33},
Keywords = {theory},
Owner = {wdixon},
Timestamp = {2017.10.23},
Url1 = {http://ncr.mae.ufl.edu/papers/ijacsp19.pdf}
}
@InProceedings{Varma2002,
Title = {Design of a Piezoelectric Meso-Scale Mobile Robot: A Compliant Amplification Approach},
Author = {V. K. Varma and W. E. Dixon},
Booktitle = {Proc. IEEE Int. Conf. Robot. Autom.},
Year = {2002},
Address = {Washington, DC},
Month = {May},
Pages = {1137-1142},
Keywords = {Robotpub}
}
@InProceedings{Walters.Kamalapurkar.ea2014,
author = {P. Walters and R. Kamalapurkar and L. Andrews and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Online Approximate Optimal Path-Following for a Mobile Robot},
year = {2014},
pages = {4536-4541},
keywords = {robotpub, Optimal, NN},
owner = {wdixon},
timestamp = {2014.07.21},
}
@InProceedings{Walters.Kamalapurkar.ea2015,
Title = {Approximate Optimal Online Continuous-Time Path-Planner with Static Obstacle Avoidance},
Author = {Patrick Walters and Rushikesh Kamalapurkar and Warren E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {2015},
Pages = {650-655},
Keywords = {Optimal, NN, Learning, robotpub},
Timestamp = {2017.11.16}
}
@Article{Walters.Kamalapurkar.ea2018,
Title = {Online Approximate Optimal Station Keeping of a Marine Craft in the Presence of an Irrotational Current},
Author = {P. Walters and R. Kamalapurkar and F. Voight and E. Schwartz and W. E. Dixon},
Journal = {IEEE Trans. Robot.},
Year = {2018},
Month = {April},
Number = {2},
Pages = {486-496},
Volume = {34},
Keywords = {Optimal, NN, Learning, robotpub, theory, aeropub},
Owner = {wdixon},
Timestamp = {2018.04.18},
Url1 = {http://ncr.mae.ufl.edu/papers/TRO18.pdf}
}
@PhdThesis{Walters.Walters.ea2015,
Title = {Guidance and Control of Marine Craft: An Adaptive Dynamic Programming Approach},
Author = {P. S. Walters},
School = {University of Florida},
Year = {2015},
Keywords = {Optimal, NN, Learning, robotpub, theory, aeropub},
Owner = {joelar},
Timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/walters.pdf},
}
@PhdThesis{Wang2012,
author = {Q. Wang},
school = {University of Florida},
title = {Lyapunov-Based Neuromuscular Electrical Stimulation Control},
year = {2012},
keywords = {RISE, Optimal, Impact, NMES, delay, NN},
owner = {wdixon},
timestamp = {2012.08.27},
url1 = {http://ncr.mae.ufl.edu/dissertations/qiang.pdf},
}
@InProceedings{Wang.Dinh.ea2012,
Title = {Neuromuscular Electrical Stimulation With An Uncertain Muscle Contraction Model},
Author = {Q. Wang and H. Dinh and M. Bellman and W. E. Dixon},
Booktitle = {Proc. Dyn. Sys. Contr. Conf.},
Year = {2012},
Address = {Ft. Lauderdale, Florida},
Month = {Oct.},
Pages = {519-528},
Keywords = {NMES},
Owner = {qiangw},
Timestamp = {2012.09.06}
}
@InProceedings{Wang.Kamalapurkar.ea2012,
Title = {Hybrid Electrical Stimulation Tracking Control of the Ankle},
Author = {Q. Wang and R. Kamalapurkar and R. J. Downey and W. E. Dixon},
Booktitle = {Proc. Dyn. Sys. Contr. Conf.},
Year = {2012},
Address = {Ft. Lauderdale},
Keywords = {NMES},
Owner = {wdixon},
Timestamp = {2013.01.02}
}
@InProceedings{Wang2010,
author = {Q. Wang and N. Sharma and M. Johnson and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Contr.},
title = {Asymptotic Optimal Control of Neuromuscular Electrical Stimulation},
year = {2010},
address = {Atlanta, GA},
pages = {839-844},
keywords = {RISE, Optimal, NMES, NN},
timestamp = {2016.07.25},
}
@InProceedings{Wang2010b,
author = {Q. Wang and N. Sharma and M. Johnson and W. E. Dixon},
booktitle = {Proc. IEEE Int. Symp. Intell. Control},
title = {Adaptive Inverse Optimal Neuromuscular Electrical Stimulation},
year = {2010},
address = {Yokohama, Japan},
month = {Sep.},
pages = {1287-1292},
keywords = {Optimal, NMES, NN},
}
@Article{Wang.Sharma.ea2013,
author = {Q. Wang and N. Sharma and M. Johnson and C. M. Gregory and W. E. Dixon},
journal = {IEEE Trans. Cybern.},
title = {Adaptive Inverse Optimal Neuromuscular Electrical Stimulation},
year = {2013},
pages = {1710-1718},
volume = {43},
keywords = {Optimal, NMES, NN},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/tcyber13.pdf},
}
@PhdThesis{Wilcox2010a,
Title = {Nonlinear Control Of Linear Parameter Varying Systems With Applications To Hypersonic Vehicles},
Author = {Z. Wilcox},
School = {University of Florida},
Year = {2010},
Keywords = {aeropub},
Owner = {wdixon},
Timestamp = {2017.05.17},
url1 = {http://ncr.mae.ufl.edu/dissertations/wilcox_z.pdf},
}
@InProceedings{Wilcox2009,
author = {Z. D. Wilcox and S. Bhat and R. Lind and W. E. Dixon},
booktitle = {Proc. AIAA Guid. Navig. Control Conf.},
title = {Control Performance Variation due to Nonlinear Aerothermoelasticity in a Hypersonic Vehicle: Insights for Structural Design},
year = {2009},
address = {Chicago, IL},
month = {Aug.},
keywords = {hypersonic, aeropub},
}
@Article{Wilcox2010,
author = {Z. D. Wilcox and W. MacKunis and S. Bhat and R. Lind and W. E. Dixon},
journal = {AIAA J. Guid. Control Dyn.},
title = {Lyapunov-Based Exponential Tracking Control of a Hypersonic Aircraft with Aerothermoelastic Effects},
year = {2010},
number = {4},
pages = {1213-1224},
volume = {33},
keywords = {LCO, hypersonic, learning, aeropub},
url = {http://ncr.mae.ufl.edu/papers/jgcd10.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/jgcd10.pdf},
}
@InProceedings{Wilcox2009a,
author = {Z. D. Wilcox and W. Mackunis and S. Bhat and R. Lind and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Robust Nonlinear Control of a Hypersonic Aircraft in the Presence of Aerothermoelastic Effects},
year = {2009},
address = {St. Louis, Missouri},
month = {Jun.},
pages = {2533-2538},
keywords = {LCO, hypersonic, learning, aeropub},
}
@InProceedings{Xu.Zegers.ea2019,
Title = {Controller Synthesis For Multi-Agent Systems with Intermittent Communication: A Metric Temporal Logic Approach},
Author = {Z. Xu and F. M. Zegers and B. Wu and W. E. Dixon and U. Topcu},
Booktitle = {Proc. Allerton Conf. on Commun., Control, and Compu.},
Year = {2019},
Month = {Sept.},
Keywords = {theory, networkpub, robotpub}
}
@InProceedings{Zegers.Chen.ea2019,
Title = {A Switched Systems Approach to Consensus of a Distributed Multi-agent System with Intermittent Communication},
Author = {F. Zegers and H.-Y. Chen and P. Deptula and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2019},
Pages = {2372-2377},
Keywords = {networkpub, theory, Robotpub}
}
@InProceedings{Zegers.Chen.ea2018,
Title = {Distributed Coordination of a Multi-agent System with Intermittent Communication: A Switched Systems Approach},
Author = {F. Zegers and H.-Y. Chen and P. Deptula and W. E. Dixon},
Booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
Year = {2018},
Keywords = {networkpub, theory, Robotpub},
Owner = {wdixon},
Timestamp = {2018.06.05}
}
@InProceedings{Zegers.Hale.ea2020,
Title = {Reputation-Based Event-Triggered Formation Control and Leader Tracking with Resilience to Byzantine Adversaries},
Author = {F. Zegers and M. Hale and J. M. Shea and W. E. Dixon},
Booktitle = {Proc. Am. Control Conf.},
Year = {2020},
Pages = {761-766},
Keywords = {networkpub, Robotpub}
}
@InProceedings{Zegers.Deptula.ea2019,
Title = {Event-Triggered Approximate Leader-Follower Consensus with Resilience to Byzantine Adversaries},
Author = {F. M. Zegers and P. Deptula and J. M. Shea and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Pages = {6412-6417},
Year = {2019},
Address = {Nice, Fr},
Month = {Dec.},
Keywords = {networkpub, theory, Robotpub}
}
@InProceedings{Zergeroglu1999b,
Title = {Composite Adaptive Output Feedback Tracking Control of Robotic Manipulators},
Author = {E. Zergeroglu and W. E. Dixon and A. Beha and D. M. Dawson},
Booktitle = {Proc. Am. Control Conf.},
Year = {1999},
Address = {San Diego, California},
Month = {Jun.},
Pages = {3013-3017},
Keywords = {Robotpub}
}
@Article{Zergeroglu2000,
author = {E. Zergeroglu and W. E. Dixon and A. Behal and D. M. Dawson},
journal = {Robotica},
title = {Adaptive Set-Point Control of Robotic Manipulators with Amplitude-Limited Control Inputs},
year = {2000},
pages = {171-181},
volume = {18},
keywords = {robotpub, Saturated},
url = {http://ncr.mae.ufl.edu/papers/robo00.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/robo00.pdf},
}
@Article{Zergeroglu1999,
Title = {Lyapunov-Based Set-Point Control of the Acrobot},
Author = {E. Zergeroglu and W. E. Dixon and D. M. Dawson and A. Behal},
Journal = {Int. J. Robot. Autom.},
Year = {1999},
Pages = {161-170},
Volume = {14},
Keywords = {Robotpub},
Url = {http://ncr.mae.ufl.edu/papers/ijra99.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/ijra99.pdf}
}
@InProceedings{Zergeroglu1999c,
Title = {Lyapunov-Based Set-Point Control of the Acrobot},
Author = {E. Zergeroglu and W. E. Dixon and D. M. Dawson and M. W. Hannan},
Booktitle = {Proc. IEEE Conf. Control Appl.},
Year = {1999},
Address = {Trieste, Italy},
Month = {Sep.},
Pages = {887-891},
Keywords = {Robotpub}
}
@Article{Zergeroglu1999a,
Title = {Composite Adaptive Output Feedback Tracking Control of Robotic Manipulators},
Author = {E. Zergeroglu and W. E. Dixon and D. Haste and D. M. Dawson},
Journal = {Robotica},
Year = {1999},
Pages = {591-600},
Volume = {17},
Keywords = {Robotpub},
Url = {http://ncr.mae.ufl.edu/papers/robo99.pdf},
Url1 = {http://ncr.mae.ufl.edu/papers/robo99.pdf}
}
@Article{Zhang2000,
Title = {Global Adaptive Output Feedback Tracking Control of Robot Manipulators},
Author = {F. Zhang and D. M. Dawson and M. S. de Queiroz and W. E. Dixon},
Journal = {IEEE Trans. Autom. Control},
Year = {2000},
Pages = {1203-1208},
Volume = {45},
Keywords = {Robotpub},
Url1 = {http://ncr.mae.ufl.edu/papers/tac00_2.pdf}
}
@InProceedings{Zhang1997,
Title = {Global Adaptive Output Feedback Tracking Control of Robot Manipulators},
Author = {F. Zhang and D. M. Dawson and M. S. de Queiroz and W. E. Dixon},
Booktitle = {Proc. IEEE Conf. Decis. Control},
Year = {1997},
Address = {San Diego, California},
Month = {Dec.},
Pages = {3634-3639},
Keywords = {Robotpub}
}
@Article{Zhang2006,
author = {X. T. Zhang and D. M. Dawson and W. E. Dixon and B. Xian},
journal = {IEEE Trans. Mechatron.},
title = {Extremum Seeking Nonlinear Controllers for a Human Exercise Machine},
year = {2006},
pages = {233-240},
volume = {11},
keywords = {robotpub, Optimal, theory},
url = {http://ncr.mae.ufl.edu/papers/mech06.pdf},
url1 = {http://ncr.mae.ufl.edu/papers/mech06.pdf},
}
@InProceedings{Zhang2004,
author = {X. T. Zhang and D. M. Dawson and W. E. Dixon and B. Xian},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Extremum Seeking Nonlinear Controllers for a Human Exercise Machine},
year = {2004},
address = {Paradise Island, Bahamas},
month = {Dec.},
pages = {3950-3955},
keywords = {robotpub, Optimal, theory},
}
@InProceedings{Zhang2004a,
author = {X. T. Zhang and D. M. Dawson and W. E. Dixon and B. Xian},
booktitle = {Proc. IEEE Int. Eng. Med. Biol. Conf.},
title = {Experimental Demonstration of an Actuated Exercise Machine},
year = {2004},
address = {San Francisco, CA},
month = {Sep.},
pages = {2707-2710},
keywords = {robotpub, Optimal, theory},
}
@Article{King.Shen.ea2020,
author = {S. N King and T. Y Shen and M N. Musselwhite and A. Huff and M. Reed and I. Poliacek and D. R. Howland and W. E. Dixon and K. F. Morris and D. C. Bolser and K. E Iceman and T. Pitts},
journal = {Fronti. Hum. Neurosci.},
title = {Swallow motor pattern is modulated by fixed or stochastic alterations in afferent feedback},
year = {2020},
number = {14},
pages = {1-11},
volume = {112},
keywords = {NMES, FES},
url1 = {http://ncr.mae.ufl.edu/papers/fneuro20.pdf},
}
@Article{RianoRios.Bevilacqua.ea2020,
author = {C. Riano-Rios and R. Bevilacqua and W. E. Dixon},
journal = {Acta Astronautica},
title = {Differential Drag-Based Multiple Spacecraft Maneuvering and On-Line Parameter Estimation Using Integral Concurrent Learning},
year = {2020},
month = sep,
pages = {189-203},
volume = {174},
keywords = {aeropub, RT2, jointPI},
url1 = {http://ncr.mae.ufl.edu/papers/astro20.pdf},
}
@InBook{Dixon2020,
author={W. E. Dixon},
editor="Ang, M. H.
and Khatib, O.
and Siciliano, B.",
chapter="Robust Control",
title="Encyclopedia of Robotics",
year="2020",
publisher="Springer Berlin Heidelberg",
pages="1--6",
keywords = {Robotpub, RT1},
url1={https://doi.org/10.1007/978-3-642-41610-1_96-1}
}
@InBook{Dixon.RLEnc.toappear,
author = {W. E. Dixon},
chapter = {Reinforcement Learning for Approximate Optimal Control},
editor = {J. Baillieul and T. Samad},
pages = {1-5},
publisher = {Springer},
title = {Encyclopedia of Systems and Control},
year = {2020},
doi = {https://doi.org/10.1007/978-3-030-44184-5},
keywords = {RT2, Optimal, NN, Learning, robotpub, theory},
}
@InProceedings{Greene.Abudia.ea2020,
author = {M. Greene and M. Abudia and R. Kamalapurkar and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Model-based Reinforcement Learning for Optimal Feedback Control of Switched Systems},
pages = {162-167},
year = {2020},
keywords = {Optimal, NN, Learning, robotpub, theory, RT2, RT1},
}
@InProceedings{Le.Luo.ea2020,
author = {D. Le and X. Luo and L. Bridgeman and M. Zavlanos and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Single-Agent Indirect Herding of Multiple Targets using Metric Temporal Logic Switching},
pages = {1398-1403},
year = {2020},
keywords = {robotpub, RT1, RT2, DucLePub, jointPI},
}
@InProceedings{Sun.Harris.ea2020,
author = {R. Sun and C. Harris and Z. Bell and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Relay-Explorer Approach for Multi-Agent Exploration of an Unknown Environment with Intermittent Communication},
year = {2020},
pages = {5218-5223},
keywords = {RT1, RT3, jointAF, robotpub, vision estimation, Runhan},
}
@InProceedings{Allen.Stubbs.ea2020a,
author = {B. C. Allen and K. Stubbs and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Robust Power and Cadence Tracking on a Motorized {FES} Cycle with an Unknown Time-Varying Input Delay},
pages = {3407-3412},
year = {2020},
keywords = {FES, NMES, BrendonAllenPub},
}
@InProceedings{Harris.R.Sun.ea2020,
author = {C. Harris and Z. Bell and R. Sun and E. Doucette and J. W. Curtis and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Target Tracking in the Presence of Intermittent Measurements by a Network of Mobile Cameras},
year = {2020},
pages = {5962-5967},
keywords = {robotpub, vision estimation, Runhan, networkpub, RT3, RT2, jointAF},
}
@InProceedings{Allen.Stubbs.ea2020b,
author = {B. C. Allen and K. Stubbs and W. E. Dixon},
booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
title = {Adaptive Trajectory Tracking During Motorized and {FES}-Induced Biceps Curls via Integral Concurrent Learning},
year = {2020},
keywords = {FES, NMES, BrendonAllenPub, ICL, adaptive, concurrent learning},
}
@InProceedings{Stubbs.Allen.ea2020,
author = {K. Stubbs and B. C. Allen and W. E. Dixon},
booktitle = {Proc. ASME Dyn. Syst. Control Conf.},
title = {Teleoperated Motorized Functional Electric Stimulation Actuated Rehabilitative Cycling},
year = {2020},
keywords = {FES, NMES, BrendonAllenPub},
}
@Article{Allen.Stubbs.ea2020d,
author = {B. C. Allen and K. J. Stubbs and W. E. Dixon},
journal = {IEEE Trans. Neural Syst. Rehabil. Eng.},
title = {Characterization of the Time-Varying Nature of Electromechanical Delay during {FES}-Cycling},
year = {2020},
number = {10},
pages = {2236-2245},
volume = {28},
keywords = {FES, NMES, BrendonAllenPub},
url1 = {http://ncr.mae.ufl.edu/papers/TNSRE20.pdf},
}
@Article{Rouse.Cousin.ea2021,
author = {C. Rouse and C. A. Cousin and B. C. Allen and W. E. Dixon},
journal = {Automatica},
title = {Shared Control for Switched Motorized {FES}-Cycling on a Split-Crank Cycle Accounting for Muscle Control Input Saturation},
pages = {1-11},
volume = {123},
year = {2021},
keywords = {FES, NMES, BrendonAllenPub},
url1 = {http://ncr.mae.ufl.edu/papers/auto21.pdf},
}
@Article{Dixon.2018,
author = {W. E. Dixon},
journal = {IEEE Control Syst.},
title = {Control Systems for Assistive and Rehabilitation Robotics},
year = {2018},
number = {6},
pages = {32-34},
volume = {38},
keywords = {FES, NMES, RobotPub},
url1 = {http://ncr.mae.ufl.edu/papers/csm18.pdf},
}
@InProceedings{Greene.Dupuis.2021ea,
author = {M. Greene and M. DuPuis and J. Cloud and W. E. Dixon},
booktitle = {AIAA SciTech Forum},
title = {Simultaneous Trajectory Tracking Control and Online Mass Estimation for a Regolith Excavating Robot via Integral Concurrent Learning},
year = {2021},
keywords = {RT2, robotpub, aeropub},
}
@Article{Rosenfeld2021,
author = {J. A. Rosenfeld and W. E. Dixon},
journal = {Fract. Calc. Appl. Anal.},
title = {Convergence Rate Estimates for the Kernelized Predictor Corrector Method for Fractional Order Initial Value Problems},
year = {2021},
number = {6},
pages = {1879-1898},
volume = {24},
keywords = {RT2, theory},
url1 = {http://ncr.mae.ufl.edu/papers/fcaa21.pdf},
}
@Article{Cousin.Rouse.ea2021,
author = {C. A. Cousin and C. A. Rouse and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Tech.},
title = {Split-Crank Functional Electrical Stimulation Cycling: An Adapting Admitting Rehabilitation Robot},
year = {2021},
number = {5},
pages = {2153-2165},
volume = {29},
keywords = {robotpub, FES, NMES},
url1 = {http://ncr.mae.ufl.edu/papers/cst21.pdf},
}
@Article{Bell.Deptula.ea2021,
author = {Z. I. Bell and P. Deptula and E. A. Doucette and J. W. Curtis and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Simultaneous Estimation of Euclidean Distances to a Stationary Object's Features and the Euclidean Trajectory of a Monocular Camera},
year = {2021},
number = {9},
pages = {4252-4258},
volume = {66},
keywords = {RT1, RT2, robotpub, vision estimation, learning, jointAF},
url1 = {http://ncr.mae.ufl.edu/papers/tac2021.pdf},
}
@InProceedings{Isaly.Allen.ea2020,
author = {A. Isaly and B. C. Allen and R. Sanfelice and W. E. Dixon},
booktitle = {IFAC Conf. Cyber-Phys. Hum.-Syst.},
title = {Zeroing Control Barrier Functions for Safe Volitional Pedaling in a Motorized Cycle},
year = {2020},
keywords = {FES, NMES, BrendonAllenPub},
}
@InProceedings{Stubbs.Allen.ea2020b,
author = {K. J. Stubbs and B. C. Allen and W. E. Dixon},
booktitle = {IFAC Conf. Cyber-Phys. Hum.-Syst.},
title = {Admittance Control of a Teleoperated Motorized Functional Electrical Stimulation Rehabilitation Cycle},
year = {2020},
keywords = {FES, NMES, BrendonAllenPub},
}
@InProceedings{Allen.Stubbs.ea2020c,
author = {B. C. Allen and K. J. Stubbs and W. E. Dixon},
booktitle = {IFAC Conf. Cyber-Phys. Hum.-Syst.},
title = {Saturated Control of a Switched {FES}-Cycle with an Unknown Time-Varying Input Delay},
year = {2020},
keywords = {FES, NMES, BrendonAllenPub},
}
@Article{Rouse.Allen.ea2020,
author = {C. A. Rouse and B. C. Allen and W. E. Dixon},
journal = {Appl. Sci.},
title = {Switched Control of Motor Assistance and Functional Electrical Stimulation for Biceps Curls},
year = {2020},
number = {10},
pages = {1-14},
volume = {22},
keywords = {FES, NMES, BrendonAllenPub},
}
@Article{Sun.RianoRios.ea2021,
author = {R. Sun and C. Riano-Rios and R. Bevilacqua and N. G. Fitz-Coy and W. E. Dixon},
journal = {AIAA J. Guid. Control Dyn.},
title = {CubeSat Adaptive Attitude Control with Uncertain Drag Coefficient and Atmospheric Density},
year = {2021},
pages = {379-388},
number = {2},
volume = {44},
keywords = {RT2, aeropub, Runhan, jointPI},
url1 = {http://ncr.mae.ufl.edu/papers/jgcd21.pdf},
}
@Article{RianoRios.Sun.ea2021,
author = {C. Riano-Rios and R. Sun and R. Bevilacqua and W. E. Dixon},
journal = {Acta Astronautica},
title = {Aerodynamic and Gravity Gradient Attitude Control for CubeSats in the Presence of Environmental and Spacecraft Uncertainties},
year = {2021},
pages = {439-450},
volume = {180},
keywords = {RT2, aeropub, Runhan, jointPI},
url1 = {http://ncr.mae.ufl.edu/papers/actaa21.pdf},
}
@Article{Sun.Greene.ea2021,
author = {R. Sun and M. Greene and D. Le and Z. Bell and G. Chowdhary and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Lyapunov-Based Real-Time and Iterative Adjustment of Deep Neural Networks},
year = {2022},
pages = {193-198},
volume = {6},
keywords = {RT2, robotpub, learning, theory, Runhan, DucLePub},
url1 = {http://ncr.mae.ufl.edu/papers/csl21.pdf},
}
@InProceedings{Zegers.Phillips.ea2021,
author = {F. Zegers and S. Phillips and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Consensus over Clustered Networks with Asynchronous Inter-Cluster Communication},
year = {2021},
pages = {4249-4254},
keywords = {networkpub, RT3, jointAF},
}
@InProceedings{Isaly.Patil.ea2021,
author = {A. Isaly and O. Patil and R. G. Sanfelice and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Adaptive Safety With Multiple Barrier Functions Using Integral Concurrent Learning},
year = {2021},
pages = {3719-3724},
keywords = {RT2, jointPI, learning, theory},
}
@InProceedings{Greene.Bell.ea2021,
author = {M. Greene and Z. Bell and S. Nivison and J. How and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Cooperative Model-Based Reinforcement Learning for Approximate Optimal Tracking},
year = {2021},
pages = {1973-1978},
keywords = {RT2, RT3, jointAF, learning, theory},
}
@Article{Allen.Stubbs.ea2021,
author = {B. C. Allen and K. J. Stubbs and W. E. Dixon},
journal = {Disabil. Rehabil.: Assist. Tech.},
title = {Electromechanical Delay During Functional Electrical Stimulation Induced Cycling is a Function of Lower Limb Position},
year = {2021},
pages = {1-6},
keywords = {FES, NMES, BrendonAllenPub},
publisher = {Taylor & Francis},
url1 = {http://ncr.mae.ufl.edu/papers/DRAT21.pdf},
}
@Article{Edwards.Le.ea2021,
author = {S. Edwards and D. Le and D. Guralnik and W. E. Dixon},
journal = {IEEE Robot. Automat. Lett.},
title = {A Topologically Inspired Path-Following Method with Intermittent State Feedback},
year = {2021},
number = {3},
pages = {4449-4456},
volume = {6},
keywords = {robotpub, DucLePub},
url1 = {http://ncr.mae.ufl.edu/papers/RAL21.pdf},
}
@Article{Zegers.Hale.ea2021,
author = {F. Zegers and M. Hale and J. Shea and W. E. Dixon},
journal = {IEEE Trans. Netw. Syst.},
title = {Event-Triggered Formation Control and Leader Tracking with Resilience to Byzantine Adversaries: A Reputation-Based Approach},
year = {2021},
number = {3},
pages = {1417-1429},
volume = {8},
keywords = {networkpub, jointPI, jointAF},
url1 = {http://ncr.mae.ufl.edu/papers/tcns21.pdf},
}
@Article{Allen.Cousin.ea2022,
author = {B. C. Allen and C. A. Cousin and C. A. Rouse and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Tech.},
title = {Robust Cadence Tracking for Switched FES-Cycling with an Unknown Time-Varying Input Delay},
year = {2022},
number = {2},
pages = {827-834},
volume = {30},
keywords = {FES, NMES, BrendonAllenPub},
url1 = {http://ncr.mae.ufl.edu/papers/cst2022b.pdf},
}
@Article{Zegers.Deptula.ea.2022,
author = {F. Zegers and P. Deptula and J. Shea and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Event/Self-Triggered Approximate Leader-Follower Consensus with Resilience to Byzantine Adversaries},
year = {2022},
month = mar,
number = {3},
pages = {1356-1370},
volume = {67},
keywords = {networkpub, RT1, RT3, JointPI},
url1 = {http://ncr.mae.ufl.edu/papers/tac2022.pdf},
}
@Article{Cousin.Duenas.ea2021,
author = {C. Cousin and V. Duenas and W. E Dixon},
journal = {Robotics},
title = {{FES} Cycling and Closed-Loop Feedback Control for Rehabilitative Human-Robot Interaction},
year = {2021},
number = {61},
pages = {1-23},
volume = {10},
keywords = {robotpub, FES, NMES},
url1 = {http://ncr.mae.ufl.edu/papers/Rob21.pdf},
}
@Article{Le.Greene.ea2021,
author = {D. Le and M. Greene and W. Makumi and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Real-Time Modular Deep Neural Network-Based Adaptive Control of Nonlinear Systems},
year = {2022},
pages = {476-481},
volume = {6},
keywords = {RT2, robotpub, learning, theory, DucLePub},
url1 = {http://ncr.mae.ufl.edu/papers/csl21_2.pdf},
}
@InProceedings{Sweatland.Allen.ea2021,
author = {H. M. Sweatland and B. C. Allen and M. L. Greene and W. E. Dixon},
booktitle = {ASME Int. Mech. Eng. Congr. Expo. (IMECE)},
title = {Deep Neural Network Real-Time Control of a Motorized FES Cycle with an Uncertain Time-Varying Electromechanical Delay},
year = {2021},
keywords = {FES, NMES, BrendonAllenPub},
}
@InBook{Greene.Deptula.ea2021,
author = {M. L. Greene and P. Deptula and R. Kamalapurkar and W. E. Dixon},
editor = {K. G. Vamvoudakis and Y. Wan and F. Lewis and D. Cansever},
pages = {139--172},
publisher = {Springer International Publishing},
chapter = {Mixed Density Methods for Approximate Dynamic Programming},
year = {2021},
address = {Cham},
isbn = {978-3-030-60990-0},
title = {Handbook of Reinforcement Learning and Control},
doi = {10.1007/978-3-030-60990-0_5},
keywords = {theory, learning, ADP, RT2},
url = {https://doi.org/10.1007/978-3-030-60990-0_5},
}
@InProceedings{Zegers.Guralnik.ea2021,
author = {F. M. Zegers and D. P. Guralnik and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Event/Self-Triggered Multi-Agent System Rendezvous with Graph Maintenance},
year = {2021},
keywords = {networkpub, RT1, RT3},
}
@InProceedings{Griffis.Le.ea2021,
author = {E. Griffis and D. Le and K. Stubbs and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Closed-Loop Deep Neural Network-Based {FES} Control for Human Limb Tracking},
year = {2021},
keywords = {RT2, robotpub, learning, theory, DucLePub, FES, NMES},
}
@InProceedings{Kanellopoulos.Fotiadis.ea2021,
author = {A. Kanellopoulos and F. Fotiadis and C. Sun and Z. Xu and K. G. Vamvoudakis and U. Topcu and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Temporal-Logic-Based Intermittent, Optimal, and Safe Continuous-Time Learning for Trajectory Tracking},
year = {2021},
keywords = {RT2, RT1, jointPI, theory, RT5},
}
@Article{Sargolzaei.Allen.ea2022,
author = {A. Sargolzaei and B. C. Allen and C. Crane and W. E. Dixon},
journal = {IEEE Trans. Ind. Inf.},
title = {Lyapunov-Based Control of a Nonlinear Multi-Agent System with a Time-Varying Input Delay under False-Data-Injection Attacks},
year = {2022},
number = {4},
pages = {2693-2703},
volume = {18},
keywords = {BrendonAllenPub, networkpub, RT1, RT3},
Url1 = {http://ncr.mae.ufl.edu/papers/tii2022.pdf}
}
@PhdThesis{Zegers2021,
Title = {Lyapunov-Based Control of Distributed Multi-Agent Systems With Intermittent Communication},
Author = {F. Zegers},
School = {University of Florida},
Year = {2021},
keywords = {networkpub, RT1, RT3},
Url1 = {http://ncr.mae.ufl.edu/dissertations/zegersdissertation.pdf}
}
@PhdThesis{Allen2021,
Title = {Characterization and Compensation of the Electromechanical Delay during {FES}-Cycling},
Author = {B. Allen},
School = {University of Florida},
Year = {2021},
Keywords = {FES, NMES, BrendonAllenPub},
Url1 = {http://ncr.mae.ufl.edu/dissertations/allendissertation.pdf}
}
@Article{Isaly.Allen.ea2021,
author = {A. Isaly and B. C. Allen and R. G. Sanfelice and W. E. Dixon},
journal = {Front. Robot. {AI}},
title = {Encouraging Volitional Pedaling in {FES}-Assisted Cycling Using Barrier Functions},
year = {2021},
note = {Special Issue on Safety in Collaborative Robotics and Autonomous Systems},
pages = {1-13},
volume = {8},
keywords = {FES, NMES, BrendonAllenPub},
url1 = {http://ncr.mae.ufl.edu/papers/frontRob21.pdf},
}
@Article{Deptula.Bell.ea2021,
author = {P. Deptula and Z. Bell and F. Zegers and R. Licitra and W. E. Dixon},
journal = {Automatica},
title = {Approximate Optimal Influence Over an Agent Through an Uncertain Interaction Dynamic},
year = {2021},
month = dec,
pages = {1-13},
volume = {134},
keywords = {Optimal, NN, Learning, robotpub, theory, RT2, jointAF},
url1 = {http://ncr.mae.ufl.edu/papers/auto2021b.pdf},
}
@Article{Patil.Isaly.ea2022,
author = {O. Patil and A. Isaly and B. Xian and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Exponential Stability with {RISE} Controllers},
year = {2022},
pages = {1592-1597},
volume = {6},
keywords = {RT2, theory, RISE},
url1 = {http://ncr.mae.ufl.edu/papers/csl22.pdf},
}
@Article{Patil.Le.ea2022,
author = {O. Patil and D. Le and M. Greene and W. E. Dixon},
journal = {IEEE Control Syst Lett.},
title = {Lyapunov-Derived Control and Adaptive Update Laws for Inner and Outer Layer Weights of a Deep Neural Network},
year = {2022},
pages = {1855-1860},
volume = {6},
keywords = {DNN, RT2, theory, AI, DucLePub},
url1 = {http://ncr.mae.ufl.edu/papers/csl22_2.pdf},
}
@Article{Cousin.Deptula.ea2022,
author = {C. Cousin and P. Deptula and C. Rouse and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Tech.},
title = {A Switched {L}yapunov-Passivity Approach to Motorized {FES} Cycling using Adaptive Admittance Control},
year = {2022},
number = {2},
pages = {740-754},
volume = {30},
keywords = {FES, NMES},
url1 = {http://ncr.mae.ufl.edu/papers/cst2022a.pdf},
}
@Article{Allen.Stubbs.ea2022,
author = {B. C. Allen and K. Stubbs and W. E. Dixon},
journal = {Automatica},
title = {Position and Cadence Tracking of a Motorized FES-Cycle with an Unknown Time-Varying Input Delay Using Saturated FES Control},
year = {2022},
pages = {110176},
volume = {139},
keywords = {FES, NMES, BrendonAllenPub},
url1 = {http://ncr.mae.ufl.edu/papers/auto2022.pdf},
}
@InProceedings{Isaly.Mamaghani.ea.2022,
author = {A. Isaly and M. Ghanbarpour and R. G. Sanfelice and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {On the Feasibility and Continuity of Feedback Controllers Defined by Multiple Control Barrier Functions},
year = {2022},
month = jun,
keywords = {theory, RT1, jointPI},
}
@InProceedings{Stubbs.Isaly.ea.2022,
author = {K. J. Stubbs and A. Isaly and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Control Barrier Functions for Safe Teleoperation of a Functional Electric Stimulation Enabled Rehabilitation System},
year = {2022},
month = jun,
keywords = {FES, NMES, robotpub},
owner = {wdixon},
}
@InProceedings{Guralnik.Stiller.ea.2022,
author = {D. Guralnik and P. Stiller and F. Zegers and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Distributed Cooperative Navigation with Communication Graph Maintenance using Single-Agent Navigation Fields},
year = {2022},
month = jun,
keywords = {RT3, jointAF, networkpub},
owner = {wdixon},
}
@InProceedings{Le.Patil.ea.2022,
author = {D. M. Le and O. S. Patil and P. Amy and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Integral Concurrent Learning-Based Accelerated Gradient Adaptive Control of Uncertain Euler-Lagrange Systems},
year = {2022},
month = jun,
keywords = {RT2, robotpub, learning, theory, DucLePub},
owner = {wdixon},
}
@InProceedings{Makumi.Greene.ea.2022,
author = {W. A. Makumi and M. L. Greene and K. J. Stubbs and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Model-Based Switched Approximate Dynamic Programming for Functional Electrical Stimulation Cycling},
year = {2022},
month = jun,
keywords = {FES, NMES, ADP, theory},
owner = {wdixon},
}
@InProceedings{Greene.Deptula.ea.2022,
author = {M. L. Greene and P. Deptula and B. Bialy and W. E. Dixon},
booktitle = {{AIAA SCITECH}},
title = {Model-Based Approximate Optimal Feedback Control of a Hypersonic Vehicle},
year = {2022},
month = jan,
note = {AIAA 2022-0613},
keywords = {jointAF, RT2, Hypersonic, aeropub, theory, learning, ADP},
owner = {wdixon},
}
@Article{Sargolzaei.Zegers.ea.2023,
author = {A. Sargolzaei and F. M. Zegers and A. Abbaspour and C. D. Crane and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Secure Control Design for Networked Control Systems with Nonlinear Dynamics under Time-Delay-Switch Attacks},
year = {2023},
month = feb,
number = {2},
pages = {798-811},
volume = {68},
keywords = {RT3, RT5, networkpub},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/tac23.pdf},
}
@Article{Patil.Sun.ea2022,
author = {O. Patil and R. Sun and S. Bhasin and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Adaptive Control of Time-Varying Parameter Systems with Asymptotic Tracking},
year = {2022},
keywords = {DNN, RT2, theory, AI, Runhan},
pages = {4809-4815},
volume = {67},
number = {9},
url1 = {http://ncr.mae.ufl.edu/papers/tac2022b.pdf},
}
@Article{Allen.Stubbs.ea.2022b,
author = {B. C. Allen and K. Stubbs and W. E. Dixon},
journal = {Automatica},
title = {Robust Cadence Tracking for Switched FES-Cycling Using a Time-Varying Estimate of the Electromechanical Delay},
year = {2022},
pages = {110466},
volume = {144},
keywords = {FES, NMES, BrendonAllenPub},
url1 = {http://ncr.mae.ufl.edu/papers/auto22b.pdf},
}
@Article{Bell.Sun.ea.2023,
author = {Z. Bell and R. Sun and K. Volle and P. Ganesh and S. Nivison and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Target Tracking Subject to Intermittent Measurements using Attention Deep Neural Networks},
year = {2023},
pages = {379-384},
volume = {7},
keywords = {RT2, Runhan, jointAF, robotpub},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/csl23.pdf},
}
@InProceedings{Griffis.Makumi.ea.2022,
author = {E. Griffis and W. Makumi and H. Sweatland and K. Stubbs and T. Taivassalo and D. Lott and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Control Tech. Appl.},
title = {Control Barrier Functions for Safe Admittance Control of a Rehabilitation Cycle for DMD},
year = {2022},
month = aug,
keywords = {robotpub},
owner = {wdixon},
}
@Article{Allen.Stubbs.eatoappear2,
author = {B. Allen and K. Stubbs and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Tech.},
title = {Robust Cadence and Power Tracking on a Switched {FES} Cycle with an Unknown Electromechanical Delay},
year = {2023},
volume = {31},
number = {1},
pages = {451-458},
keywords = {FES, NMES, BrendonAllenPub},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/cst23.pdf},
}
@Article{Greene.Deptula.ea23,
author = {M. L. Greene and P. Deptula and S. Nivison and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Approximate Optimal Trajectory Tracking with Sparse Bellman Error Extrapolation},
year = {2023},
volume = {68},
number = {6},
pages = {3618-3624},
keywords = {RT2, adaptive, theory},
url1 = {http://ncr.mae.ufl.edu/papers/tac234.pdf},
}
@InProceedings{Patil.Le.ea.2022,
author = {O. S. Patil and D. M. Le and E. Griffis and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Deep Residual Neural Network {(ResNet)}-Based Adaptive Control: A {L}yapunov-Based Approach},
year = {2022},
keywords = {AI, RT2, learning, theory, DucLePub},
owner = {wdixon},
}
@InProceedings{Griffis.Isaly.ea.2022,
author = {E. Griffis and A. Isaly and D. M. Le and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Deep Neural Network-Based Adaptive FES-Cycling Control: Part II, A Hybrid Systems Approach},
year = {2022},
keywords = {AI, RT2, learning, theory, DucLePub, FES, RT1},
owner = {wdixon},
}
@InProceedings{Patil.Stubbs.ea.2022,
author = {O. S. Patil and K. Stubbs and P. Amy and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Exponential Stability with {RISE} Controllers for Uncertain Nonlinear Systems with Unknown Time-Varying State Delays},
year = {2022},
keywords = {RT2, learning, theory, delay},
owner = {wdixon},
}
@InProceedings{Le.Patil.ea.2022a,
author = {D. M. Le and O. S. Patil and C. Nino and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Accelerated Gradient Approach For Neural Network-based Adaptive Control Of Nonlinear Systems},
year = {2022},
keywords = {AI, RT2, learning, theory, DucLePub},
owner = {wdixon},
}
@InProceedings{Sweatland.Isaly.ea.2022,
author = {H. Sweatland and A. Isaly and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {High-Order Control Barrier Function for Constraining Position in Motorized Rehabilitative Cycling},
year = {2022},
keywords = {FES, RT1},
owner = {wdixon},
}
@InProceedings{Zegers.Guralnik.ea.2022,
author = {F. Zegers and D. Guralnik and S. Edwards and C.-L. Lee and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Event-Triggered Consensus for Second-Order Systems: A Hybrid Systems Perspective},
year = {2022},
keywords = {networkpub, RT1, RT3},
owner = {wdixon},
}
@PhdThesis{Greene.2022,
author = {M. Greene},
school = {University of Florida},
title = {Nonsmooth Data-Based Reinforcement Learning for Online Approximate Optimal COntrol},
year = {2022},
keywords = {RT2, RT1, Theory, RL, AI},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/dissertations/Greene_Dissertation.pdf},
}
@PhdThesis{Sun.2022,
author = {R. Sun},
school = {University of Florida},
title = {Data-Based Learning for Uncertain Nonlinear Systems with Intermittent State Feedback},
year = {2022},
keywords = {RT2, Runhan, AI, Learning},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/dissertations/RunhanSun.pdf},
}
@Article{Zegers.Sun.ea23,
author = {F. Zegers and R. Sun and G. Chowdhary and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Distributed State Estimation with Deep Neural Networks for Uncertain Nonlinear Systems under Event-Triggered Communication},
year = {2023},
keywords = {robotpub, Runhan, AI, RT2, RT3, networkpub},
number = {5},
pages = {3107-3114},
volume = {68},
keywords = {robotpub, RT2, RT3, networkpub},
url1 = {http://ncr.mae.ufl.edu/papers/tac233.pdf},
}
}
@Article{Zegers.Deptula.ea.2023,
author = {F. Zegers and P. Deptula and H.-Y. Chen and A. Isaly and W. E. Dixon},
journal = {IEEE Trans. Robot.},
title = {A Switched Systems Approach to Multi-Agent System Consensus: A Relay-Explorer Perspective},
year = {2023},
number = {1},
pages = {605-624},
volume = {39},
keywords = {robotpub, RT2, RT3, networkpub},
url1 = {http://ncr.mae.ufl.edu/papers/tro23.pdf},
}
@Article{Allen.Stubbs.eatoappear,
author = {B. Allen and K. Stubbs and W. E. Dixon},
journal = {IEEE Trans. Neural Syst. Rehabil. Eng.},
title = {Data-based and Opportunistic Integral Concurrent Learning for Adaptive Trajectory Tracking During Switched FES-Induced Biceps Curls},
year = {2022},
keywords = {FES, NMES, BrendonAllenPub},
volume = {30},
pages = {2557-2566},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/tnsre22.pdf},
}
@InProceedings{Makumi.Greene.ea2023,
author = {W. Makumi and M. Greene and Z. Bell and B. Bialy and R. Kamalapurkar and W. E. Dixon},
booktitle = {AIAA SciTech},
title = {Hierarchical Reinforcement Learning and Gain Scheduling-based Control of a Hypersonic Vehicle},
year = {2023},
keywords = {ADP, RL, RT2, jointAF, aeropub},
}
@InProceedings{Hart.Stubbs.ea.2020,
author = {R. Hart and K. Stubbs and W. Makumi and E. Griffis and We. E. Dixon},
booktitle = {Proc. Biomed. Eng. Soc. (BMES) Annu. Meet.},
title = {Nonlinear Torque Control for Rehabilitative Cycling},
keywords = {FES, NMES, HartPub},
year = {2020},
owner = {wdixon},
}
@PhdThesis{Le2022,
author = {D. Le},
school = {University of Florida},
title = {Deep and Accelerated Learning in Adaptive Control: A Lyapunov-based Approach},
year = {2022},
keywords = {DNN, RT1, RT2, theory, AI, DucLePub},
url1 = {http://ncr.mae.ufl.edu/dissertations/DucLe.pdf},
}
@Article{Ghanbarpour.Isaly.eatoappear,
author = {M. Ghanbarpour and A. Isaly and R. G. Sanfelice and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Optimal Safety for Constrained Differential Inclusions using Nonsmooth Control Barrier Functions},
year = {2023},
keywords = {RT1, RT3, theory, jointPI},
volume = {7},
pages = {1303-1308},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/csl23_2.pdf},
}
@Article{Greene.Bell.ea.2023,
author = {M. Greene and Z. Bell and S. Nivison and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Deep Neural Network-based Approximate Optimal Tracking for Unknown Nonlinear Systems},
year = {2023},
keywords = {jointAF, AI, RT2, Learning, ADP, theory. optimal},
volume = {68},
number = {5},
pages = {3171-3177},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/tac232.pdf},
}
@InProceedings{Nino.Zegers.ea.2023,
author = {C. F. Nino and F. Zegers and S. Phillips and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Consensus over Clustered Networks Using Output Feedback and Asynchronous Inter-Cluster Communication},
year = {2023},
keywords = {networkpub, RT3, jointAF},
owner = {wdixon},
}
@Article{Sun.Bharadwaj.ea23,
author = {R. Sun and S. Bharadwaj and Z. Xu and U. Topcu and W. E. Dixon},
journal = {Automatica},
title = {Reactive Synthesis for Relay-Explorer Consensus with Intermittent Communication},
year = {2023},
keywords = {RT3, RT2, networkpub, jointPI, robotpub, Runhan},
volume = {154},
pages = {111057},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/auto23.pdf},
}
@InProceedings{Griffis.Patil.ea.2023,
author = {E. Griffis and O. Patil and W. Makumi and W. E. Dixon},
booktitle = {IFAC World Congr.},
title = {Deep Recurrent Neural Network-Based Observer for Uncertain Nonlinear Systems},
year = {2023},
keywords = {RT2, theory, learning, AI},
}
@InProceedings{Makumi.Greene.ea2023_2,
author = {W. Makumi and M. Greene and Z. Bell and S. Nivison and R. Kamalapurkar and W. E. Dixon},
booktitle = {IFAC World Congr.},
title = {Hierarchical Reinforcement Learning-based Supervisory Control of Unknown Nonlinear Systems},
year = {2023},
keywords = {jointAFRL, RT2, Learning, AI, Theory},
}
@PhdThesis{Patil2023,
author = {O. Patil},
school = {University of Florida},
title = {Implicit And Deep Learning-Based Control Methods for Uncertain Nonlinear Systems},
year = {2023},
keywords = {DNN, RT1, RT2, theory, AI},
url1 = {http://ncr.mae.ufl.edu/dissertations/Omkar.pdf},
}
@PhdThesis{Isaly2023,
author = {A. Isaly},
school = {University of Florida},
title = {Safe Control Design for Uncertain Nonlinear Systems Using Multiple Control Barrier Functions},
year = {2023},
keywords = {RT1, RT2, theory},
url1 = {http://ncr.mae.ufl.edu/dissertations/Axton.pdf},
}
@Article{Griffis.Patil.ea23_2,
author = {E. Griffis and O. Patil and Z. Bell and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Lyapunov-Based Long Short-Term Memory ({L}b-{LSTM}) Neural Network-Based Control},
year = {2023},
pages = {2976-2981},
volume = {7},
keywords = {RT2, jointAF, Learning, AI, adaptive},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/csl234.pdf},
}
@Article{Makumi.Bell.ea23,
author = {W. Makumi and Z. Bell and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Approximate Optimal Indirect Regulation of an Unknown Agent with a Lyapunov-Based Deep Neural Network},
year = {2023},
pages = {2773-2778},
volume = {7},
keywords = {RT2, jointAF, RT1, RT3, AI, robotpub, networkpub},
owner = {wdixon},
url1 = {http://ncr.mae.ufl.edu/papers/csl233.pdf},
}
@InProceedings{Hart.patil.ea2023,
author = {R. Hart and O. Patil and E. Griffis and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Deep {L}yapunov-Based Physics-Informed Neural Networks ({D}e{L}b-{PINN}) for Adaptive Control Design},
year = {2023},
keywords = {RT2, learning, adaptive, Hartpub},
}
@InProceedings{Nino.Patil.ea2023,
author = {C. F. Nino and O. S. Patil and J. Philor and Z. Bell and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Deep Adaptive Indirect Herding of Multiple Target Agents with Unknown Interaction Dynamics},
year = {2023},
keywords = {jointAFRL, RT3, RT2, theory, network, robotpub, learning, adaptive},
}
@InProceedings{Sweatland.Griffis.ea2023,
author = {H. Sweatland and E. Griffis and V. H Duenas and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Passivity-Based Hybrid Systems Approach to Repetitive Learning Control for {FES}-Cycling with Control Input Saturation},
year = {2023},
keywords = {NMES, FES, Learning, Adaptive, Hybrid, Theory, Passivity},
}
@InProceedings{Isaly.Edwards.ea2023,
author = {A. Isaly and S. Edwards and Z. Bell and W. E. Dixon},
booktitle = {Proc. IEEE Conf. Decis. Control},
title = {Weighted Prioritization of Constraints in Optimization-Based Control},
year = {2023},
keywords = {jointAFRL, RT1, RT2, theory},
}
@Article{Xu.Zegers.eatoappear,
author = {Z. Xu and F. Zegers and N. Baharisangari and B. Wu and A. Phillips and W. E. Dixon and U. Topcu},
journal = {IEEE Access},
title = {Controller Synthesis for Multi-Agent Systems with Intermittent Communication and Metric Temporal Logic Specifications},
year = {2023},
keywords = {RT2, jointAF, RT1, RT3, robotpub, networkpub},
owner = {wdixon},
pages = {91324-91335},
volume = {11},
url1 = {http://ncr.mae.ufl.edu/papers/access23.pdf},
}
@InProceedings{Makumi.Bell.ea2024,
author = {W. Makumi and Z. Bell and W. E. Dixon},
booktitle = {AIAA SciTech},
title = {Cooperative Approximate Optimal Indirect Regulation of Uncooperative Agents with Lyapunov-Based Deep Neural Network},
year = {2024},
keywords = {RT2, jointAF, RT1, RT3, AI, robotpub, networkpub},
}
@Article{Nino.Patil.Dixon.2023,
author = {C. Nino and O. Patil and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Second-Order Heterogeneous Multi-Agent Target Tracking without Relative Velocities},
year = {2023},
pages = {3663-3668},
volume = {7},
keywords = {networkpub, theory, Robotpub, RT3, RT1},
url1 = {http://ncr.mae.ufl.edu/papers/csl235.pdf},
}
@Article{Hart.Griffis.ea2024,
author = {R. Hart and E. Griffis and O. Patil and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Lyapunov-based Physics-Informed Long Short-Term Memory ({LSTM}) Neural Network-Based Adaptive Control},
year = {2024},
volume = {8},
Pages = {13-18},
keywords = {RT2, learning, adaptive, Hartpub},
url1 = {http://ncr.mae.ufl.edu/papers/csl24_2.pdf},
}
@Article{Griffis.Patil.ea2024,
author = {E. Griffis and O. Patil and R. Hart and W. E. Dixon},
journal = {IEEE Control Syst. Lett.},
title = {Lyapunov-Based Long Short-Term Memory ({L}b-{LSTM}) Neural Network-Based Adaptive Observer},
year = {2024},
pages = {97-102},
volume = {8},
keywords = {RT2, learning, adaptive, Hartpub},
url1 = {http://ncr.mae.ufl.edu/papers/csl24.pdf},
}
@Article{Stubbs.Allen.ea2024,
author = {K. Stubbs and B. Allen and W. E. Dixon},
journal = {IEEE Trans. Control Syst. Tech.},
title = {Telerehabilitation Through a Remotely Operated Motorized Functional Electric Stimulation Actuated Cycle},
year = {2024},
month = may,
number = {3},
pages = {744-754},
volume = {32},
keywords = {FES, NMES, BrendonAllenPub},
url1 = {http://ncr.mae.ufl.edu/papers/cst24.pdf},
}
@Article{Guralnik.Stiller.eatoappear,
author = {D. Guralnik and P. Stiller and F. Zegers and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Plug-and-Play Cooperative Navigation: From Single-Agent Navigation Fields to Graph-Maintaining Distributed MAS Controllers},
year = {to appear},
keywords = {networkpub, theory, Robotpub},
}
@InProceedings{Philor.Makumi.ea2024,
author = {J. Philor and W. Makumi and Z. Bell and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Approximate Optimal Indirect Control of an Unknown Agent within a Dynamic Environment using a Lyapunov-Based Deep Neural Network},
year = {2024},
keywords = {jointAFRL, RT2, Learning, AI, Theory},
}
@InProceedings{Edwards.Isaly.ea2024,
author = {S. Edwards and A. Isaly and J. Brewer and W. E. Dixon},
booktitle = {Proc. Am. Control Conf.},
title = {Capturing a Non-Cooperative Resident Space Object: A Control Barrier Function Approach},
year = {2024},
keywords = {RT2, theory, jointAFRL},
}
@Article{Le.Teel.ea2024,
author = {D. Le and A. R. Teel and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {A Switched System Dwell-time Update Mechanism For Path Following With Intermittent State Feedback Constraints},
year = {2024},
keywords = {RT1, robotpub, theory, DucLePub},
}
@Article{Isaly.Patil.ea2024,
author = {A. Isaly and O. Patil and H. Sweatland and R. Sanfelice and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Adaptive Safety with a RISE-Based Disturbance Observer},
year = {2024},
keywords = {RT1, RT2, theory, jointPI},
}
@Article{Isaly.Mamaghani.eatoappear,
author = {A. Isaly and M. Mamaghani and R. G. Sanfelice and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {On the Feasibility and Continuity of Feedback Controllers Defined by Multiple Control Barrier Functions},
year = {to appear},
keywords = {theory, RT1, jointPI},
}
@Article{Rotithor.Taplin.eatoappear,
author = {G. Rotithor and T. Taplin and A. P. Dani and W. E. Dixon},
journal = {IEEE Trans. Autom. Control},
title = {Switching of Asymptotically Stable and Uniformly Ultimately Bounded Systems With Applications to Machine Vision},
year = {to appear},
keywords = {vision, RT1},
}
@Article{Le.Patil.eatoappear,
author = {D. Le and O. Patil and C. Nino and W. E. Dixon},
journal = {IEEE Trans. on Neural Netw. Learn. Syst.},
title = {Accelerated Gradient Approach For Deep Neural Network-based Adaptive Control of Unknown Nonlinear Systems},
year = {to appear},
keywords = {RT2, theory, learning},
}
![]() Research |
People |
Publications |
Contact |
Outreach |
Fun Stuff
Research |
People |
Publications |
Contact |
Outreach |
Fun Stuff
© University of Florida, Gainesville, FL 32611; (352) 656-5924.