| Overview The Nonlinear Controls and Robotics group at the University of Florida is focused on the development of theoretical methods motivated by systems that exhibit uncertain nonlinear behaviors. The unifying theme of all the projects is the use of Lyapunov-based methods for design and also the stability analysis of the resulting closed-loop system. In addition to expertise in nonlinear systems, NCR researchers focus on methods to compensate for uncertainties in the dynamics through various adaptive and learning control methods. Specific research projects and the related publications can be mapped into the following general domains. Below is a brief description of the domains, with links to further descriptions and related publications. | ||||||
| Aerospace and Maritime Systems 
NCR efforts focus on vehicular systems that operate in maritime, aeronautical
(atmospheric), and space environments. The operational environment of a vehicle
can introduce unique challenges including: optimal tradeoffs with size, weight,
power, and performance; sensory feedback and communications constraints; and
environmental disturbances such as heat and vibration.
See Additional Details.
Autonomous systems must execute high level missions plans with verifiable assurances despite uncertain adversarial environments where the integrity and availability
of sensor information and communications are challenged. Key innovations include analysis, design and synthesis tools that enable autonomous mission execution despite
uncertainty within complex dynamics while accounting for the integrity and privacy of information on computationally constrained resources.
The Air Force Office Of Scientific Research Center of Excellence in Assured Autonomy in Contested Environments addresses challenges such as: situational awareness;
sensing and communication latency/intermittency; information provenance and integrity; private computation and communication; and collaborative effects resulting
from agent coordination/disaggregation in a network and over complex network channel dynamics.
See Additional Details.
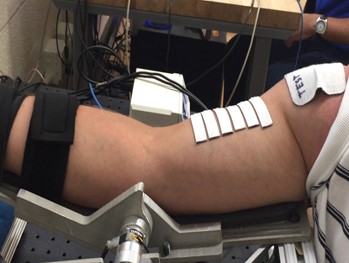
Bionics involves the integration of biological systems with man-made electromechanical systems. Efforts within the NCR group focus on closed-loop human machine interaction.
The goal of this work is to use control systems theories to provide coordinated, repetitive, precise, and accurate
limb motion that involves electrical stimulation and/or motorized (robotic) assistance to facilitate neural plasticity in individuals with neurological conditions that affect limb motion.
See Additional Details.
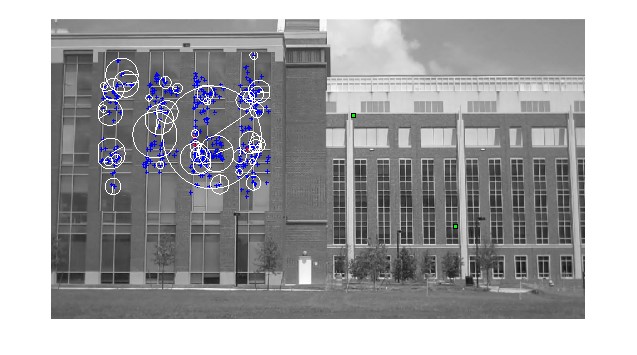
Imaging systems provide an understanding of relative position and orientation between the camera and features in the field-of-view. NCR efforts focus on the challenges associated
with using feedback from imaging sensors such as intermittent loss of feature tracking and lack of (depth) scale information. Contributions include the use of control systems tools to
yield image-based state estimators (e.g., structure from motion (SfM), simultaneous localization and mapping (SLAM)) and visual servo control.
See Additional Details.
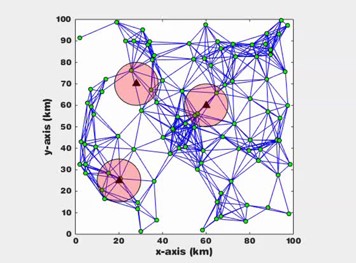
Agents are often tasked to work together to realize collaborative advantages. Such collaborative behavior results in numerous challanges to control the agents in
the network and over a network. Efforts in the NCR group focus on coordinated behavior using local, distributed, and intermittent feedback in operating domains where
environmental disturbances yield uncertainty.
See Additional Details.
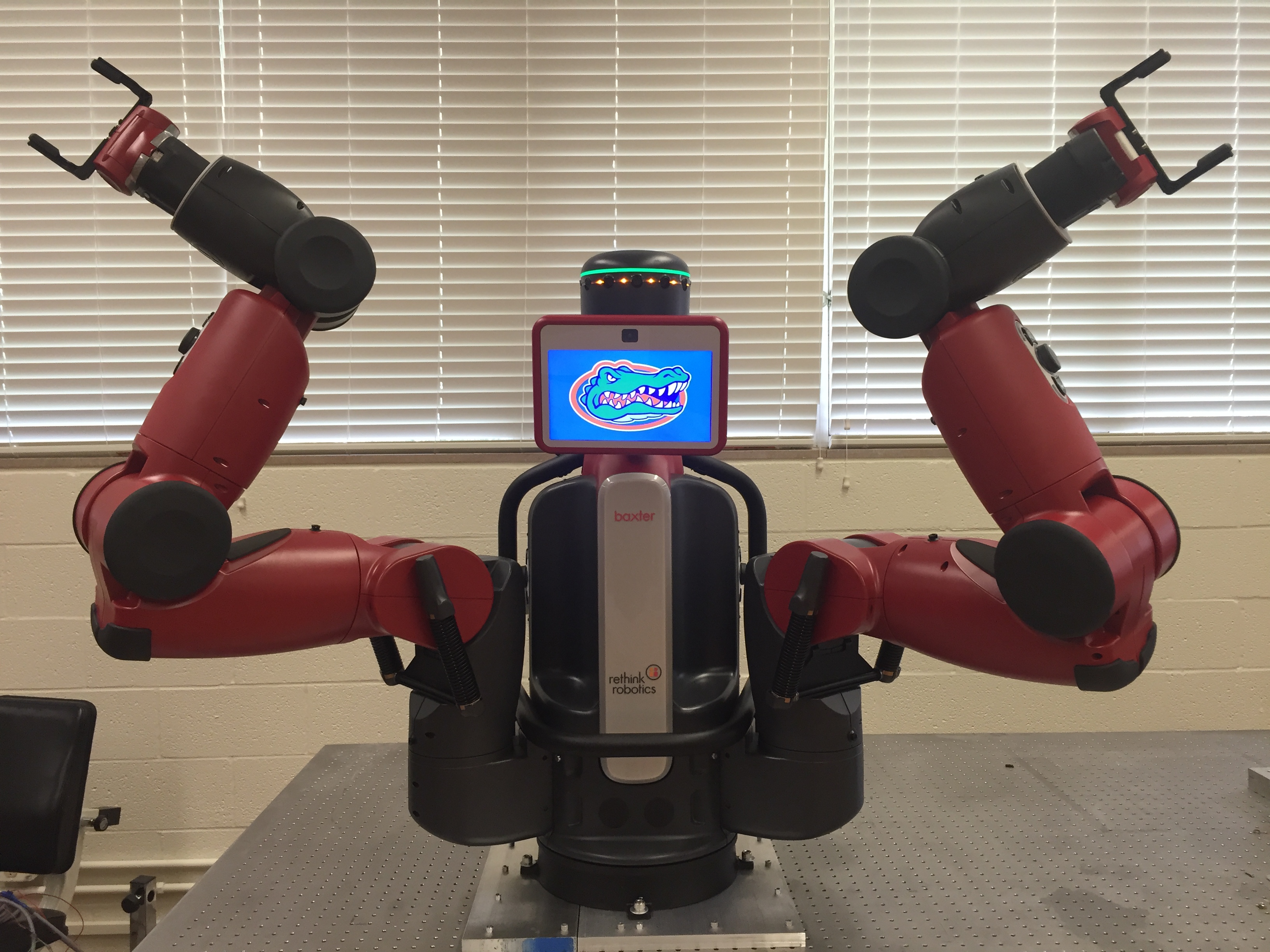
Robotics is an application domain that includes various disciplines: artificial intelligence and autonomous behaviors, control systems, mechanical design,
sensors, motion planning, human machine interaction, and etc. Efforts within the NCR group specifically focus on control problems associated with robotic manipulation and
unmanned (air, land, and marine) vehicular systems.
See Additional Details. Lyapunov-based methods provide analysis and design tools for nonlinear systems.
Efforts in the NCR group focus on the development and use of these tools for uncertain nonlinear systems. Example contributions include:
adaptive dynamic programming; switched/hybrid, intermittent feedback, event-triggered methods; adaptive and learning control methods; and delay compensation techniques.
See Additional Details. |